Емкостные преобразователи
Страница 2
К емкостным преобразователям близки по своим характеристикам полупроводниковые диоды, в которых используется зависимость так называемой барьерной емкости от обратного напряжения. Такие преобразователи применяются в качестве элементов с электрически управляемой емкостью и называются варикапами.
Другая группа ЭС преобразователей основана на использовании сегнетоэлектриков, т. е. кристаллических диэлектриков, которые при определенных температурных условиях (при температуре ниже точки Кюри) обладают самопроизвольной поляризацией при отсутствии внешних электрических полей.
Состояние кристаллических диэлектриков характеризуется электрической индукцией D (или зарядом q), деформацией c и энтропией Э. Эти величины зависят от напряженности электрического поля Е (или напряжения U), механического напряжения s (или силы F) и температуры Т. На рис. 4 схематически показаны связи между указанными величинами.

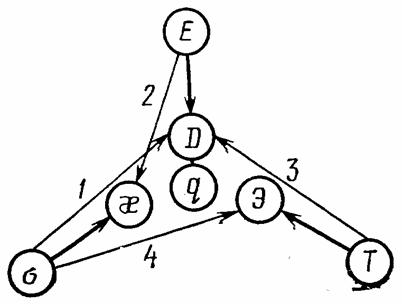
Рис. 4 Схема связей между параметрами диэлектрика
Жирными стрелками показаны связи Е®D, s®c, T®Э, а тонкими стрелками изображены физические эффекты, свойственные сегнетоэлектрикам:
1 - прямой пьезоэлектрический эффект s®D (или q), проявляющийся в изменении поляризации кристалла действием механических напряжений;
2 - обратный пьезоэлектрический эффект Е (или U)®c, характеризующийся деформацией кристалла под днем электрического поля;
3 - пироэлектрический эффект T®D (или q), сводящийся к изменению заряда на поверхности кристалла при изменении температуры;
4 - пьезокалорический эффект s®Э, проявляющийся в изменении энтропии при изменении механических напряжений.
Помимо указанных эффектов при изменении Е, s, Т в кристаллах возникают побочные явления, например, изменяются диэлектрическая проницаемость, проводимость, оптические свойства и т.д.
Из указанных эффектов рассмотрим прямой и обратный пьезоэффекты, а также эффект изменения емкостной проводимости при изменении напряжения U. Преобразователи, в которых используются прямой или обратный пьезоэффекты, называются пьезоэлектрическими преобразователями.
Использование эффекта изменения емкостной проводимости в кристаллических полупроводниках обусловлено нелинейной зависимостью заряда q от приложенного напряжения U. Если зависимость q(U) линейна, то в выражении Dq=(¶q/¶U) величина C=¶q/¶U постоянна и представляет собой емкость. В случае нелинейной зависимости q(U) величина C=¶q/¶U также является емкостью, но не постоянной, а зависящей от напряжения U, т. е. C(U). Преобразователи, основанные на использовании нелинейной зависимости емкости от напряжения в сегнетоэлектриках, называются варикондами.
Емкостные датчики можно разделить на две основные группы - датчики параметрические (недифференциальные) и датчики дифференциальные.
В схемах с параметрическими датчиками происходит преобразование входной неэлектрической величины (угла поворота оси ротора датчика) в электрическую выходную величину (частоту, ток, напряжение), функционально зависящую от входной величины.
В схемах с дифференциальными датчиками, включенными в следящие системы, с датчика снимается лишь сигнал рассогласования, который становится равным нулю в установившемся состоянии следящей системы.
Примером параметрического емкостного датчика может служить переменная емкость, включенная в контур лампового генератора (рис. 5) . Здесь при изменении угла поворота оси ротора изменяется емкость датчика и меняется частота генератора, являющаяся выходной величиной.
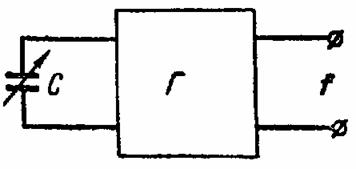
Рис. 5 Емкостной датчик, включенный в контур с генератором
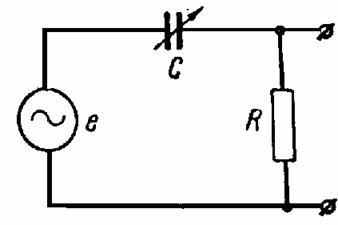
Рис 6. Емкостной датчик, включенный в цепь переменного тока
На рис. 6 приведен другой пример использования параметрического датчика. В этом случае с изменением значения емкости С меняется ток через нее, а следовательно, и напряжение на выходе системы, падающее на сопротивлении нагрузки R , которое и является выходной величиной.
, которое и является выходной величиной.
Подобные системы являются разомкнутыми системами регулирования. Основным недостатком этих схем является зависимость значения выходной величины от параметров источника питания датчика, усилителя и других элементов схемы, а также от внешних условий. В самом Деле, стоит измениться напряжению или частоте генератора, питающего датчик (рис. 6), как напряжение, частота и фаза, являющиеся выходными величинами и снимаемые с сопротивления R, также изменятся.
От этих недостатков свободны схемы с дифференциальными емкостными датчиками, включенными в замкнутую систему автоматического регулирования. В этих схемах выходной величиной является угол поворота оси отрабатывающего двигателя или другой оси, связанной с нею через редуктор. Одной из основных характеристик такой системы является чувствительность, показывающая, при каком минимальном отклонении чувствительного элемента система отработки приходит в действие. Внешние факторы - напряжение питания, температура окружающей среды и т. п. - влияют лишь на чувствительность системы; на точность системы они могут влиять лишь в той мерь, в какой она связана с чувствительностью.
Это значит, что схемы с емкостными дифференциальными датчиками, так же как и любые мостовые нулевые схемы с линейными относительно частоты и напряжения сопротивлениями в плечах, предъявляют значительно меньшие требования к стабильности источника питания.
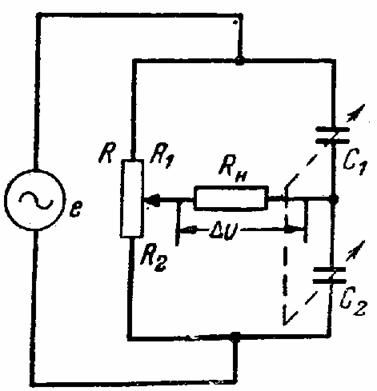
Рис. 7 Мостовая схема с емкостным дифференциальным датчиком
В простейшем случае дифференциальный емкостный датчик представляет собой две последовательно включенные емкости, построенные конструктивно таким образом, что при увеличении одной из них другая уменьшается. Эти две емкости могут быть включены в мостовую схему (рис. 7), где два других плеча - реостатные. Если при этом напряжение, снимаемое с диагонали моста, использовать в качестве сигнала для следящей системы, перемещающей щетку потенциометра R в сторону уменьшения рассогласования, то всегда в установившемся состоянии следящей системы это напряжение  u=0 в этом случае справедливо соотношение
u=0 в этом случае справедливо соотношение
 (4)
(4)
Отсюда следует, что в схемах с дифференциальными емкостными датчиками с воздушным диэлектриком показания отрабатывающего органа (например, положение стрелки Указателя) не зависят ни от состава газа, ни от наличия в нем влаги (не выпадающей в виде капель), так как для обеих емкостей, составляющих дифференциальный датчик,  меняется одинаково. Для недифференциальных же схем такое влияние может наблюдаться, хотя и в небольших пределах, так как для воздуха с влажностью 0% =l.0006, а для воздуха с влажностью 100% при t=+20°С =l.0008. В этих схемах эта величина составит соответственно погрешность примерно 0,02%, в то время как от некоторых систем с емкостными дифференциальными датчиками удалось добиться более высокой точности.
меняется одинаково. Для недифференциальных же схем такое влияние может наблюдаться, хотя и в небольших пределах, так как для воздуха с влажностью 0% =l.0006, а для воздуха с влажностью 100% при t=+20°С =l.0008. В этих схемах эта величина составит соответственно погрешность примерно 0,02%, в то время как от некоторых систем с емкостными дифференциальными датчиками удалось добиться более высокой точности.
В емкостных преобразователях емкость С может меняться или за счет изменения параметров конденсатора Dd, Ds, De. При этом выполняются функции преобразования неэлектрических величин в изменение емкости или производится модуляция емкости, что имеет место в емкостных модуляторах, ЭС генераторах и др.
При работе преобразователя последовательно с его емкостью С включается сопротивление R (см. рис. 3), специально предусмотренное или представляющее собой сопротивление подводящих проводов. В зависимости от соотношения сопротивлений R и 1/jWC преобразователь будет работать в разных режимах. Если R >> 1/WC или RWC >> 1, то U Ur и заряд конденсатора qCU = const, т. е. преобразователь работает в режиме заданного заряда. В этом случае U
Ur и заряд конденсатора qCU = const, т. е. преобразователь работает в режиме заданного заряда. В этом случае U =q/C=C
=q/C=C U/(C+
U/(C+ Csin
Csin t)U[l-(C/C)sint] и выходным параметром преобразователя является переменная составляющая напряжения U. Этот режим реализуется, в частности, на высоких частотах. Если R << 1/WC или RWC << 1, то падение напряжения будет и U
t)U[l-(C/C)sint] и выходным параметром преобразователя является переменная составляющая напряжения U. Этот режим реализуется, в частности, на высоких частотах. Если R << 1/WC или RWC << 1, то падение напряжения будет и U Uconst, т. е. преобразователь работает в режиме заданного напряжения. Для такого режима q=U(C+CsinWt); I=dq/dt=UCWcosWt и выходной величиной является ток. Такой режим имеет место на малых частотах.
Uconst, т. е. преобразователь работает в режиме заданного напряжения. Для такого режима q=U(C+CsinWt); I=dq/dt=UCWcosWt и выходной величиной является ток. Такой режим имеет место на малых частотах.