ОК «Буран»
Страница 8
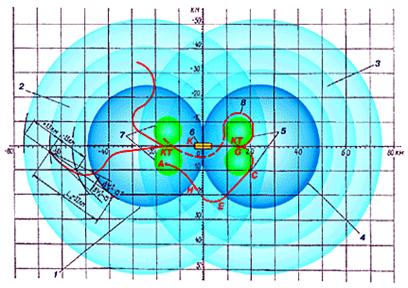 Схема предпосадочного маневрирования:
Схема предпосадочного маневрирования:
1 - западный ЦРЭ; 2 - штатная область приведения на высоту Н=20 км при нацеливании на западный ЦРЭ; 3 - то же на восточный ЦРЭ; 4 - восточный ЦРЭ; 5 - восточный ЦВК; 6 - взлетно-посадочная полоса; 7 - западный ЦВК; 8 - траектория полета ОК; АН - спираль отворота; НЕ - спираль поворота; ЕС - касательная к ЦВК; CG - дуга окружности ЦВК; GK - финишная прямая; КТ - ключевая точка Красным пунктиром показана траектория захода на посадку в первом полете.
Задачей предпосадочного маневрирования является выведение ОК к началу траектории захода на посадку в ключевую точку (КТ), расположенную на высоте 4 км в вертикальной плоскости, проходящей через ось ВПП, с ориентацией в ней (в плоскости) вектора скорости. Параметры движения ОК в КТ жестко ограничены по координатам, скорости, углу наклона траектории и отклонению от посадочного курса. Их реализация достигается схемой движения, обеспечивающей соответствие между располагаемой энергией ОК и энергией, потребной для приведения его в КТ. Энергия регулируется изменением длины траектории и программного скоростного напора (управление аэродинамическим качеством), а в дозвуковой области - еще и изменением угла раскрытия воздушного тормоза. Управление движением ОК осуществляется формированием в начале участка предпосадочного маневрирования в соответствии с текущим состоянием ОК пространственной опорной траектории (и последующим её отслеживанием), которая может перестраиваться в ходе полета, если энергетическое состояние ОК не удовлетворяет заданным требованиям. "След" опорной траектории в горизонтальной плоскости представляет собой систему геометрических линий (см. схему предпосадочного маневрирования): спираль отворота - спираль поворота - касательная к цилиндру выверки курса (ЦВК) - дуга окружности ЦВК - финишная прямая, при этом спирали отворота и поворота соответствуют полету ОК с постоянным углом крена =45 , координаты КТ, центров ЦВК и радиусы ЦВК постоянны, а спираль отворота реализуется в случае избытка энергии.
В вертикальной плоскости на скоростях, соответствующих М не менее 0.8, опорная траектория формируется построение программной зависимости высоты, соответствующей номинальному скоростному напору, от оставшейся дальности по . На режимах при М<0.8 реализуется управление высотой полета относительно заданного состояния в точке окончания предпосадочного маневра (терминальное управление). При дефиците располагаемой энергии для увеличения протяженности полета ОК в качестве опорной используется зависимость минимального скоростного напора от высоты полета qmin(Н), обеспечивающая максимальное качество, а при ее избытке - зависимость максимального скоростного напора от высоты полета qmax(Н), обеспечивающая наибольшее рассеивание энергии.
Заключительной фазой участка спуска в атмосфере являются заход на посадку и собственно посадка ОК на ВПП с заданными параметрами движения. Заход на посадку и посадка определяются двумя особенностями ОК:
· первая - отсутствие двигателей, обеспечивающих посадку по традиционной самолетной схеме, и
· вторая - сравнительно малое аэродинамическое качество (Кmax=5,6) на этом участке полета.
В связи с этим для захода на посадку с последующей посадкой ОК на ВПП принята двухглиссадная схема, при которой вся траектория разбивается на четыре участка:
|
· п е р в ы й - полет по крутой глиссаде с углом наклона -(17 .22) , на котором компенсируются ошибки приведения по координатам, скоростям и углам при выходе ОК на крутую глиссаду с последующей стабилизацией относительно жесткой опорной траектории с постоянной заданной приборной скоростью. Этот участок характеризуется режимом равновесного планирования, т.е. полетом с постоянным углом наклона траектории и постоянной скоростью, когда внешние возмущающие воздействия компенсируются изменением эффективного аэродинамического качества увеличением или уменьшением угла раскрытия воздушного тормоза. Так как внешние возмущающие воздействия с равной вероятностью могут быть как встречного, так и попутного характера, то в невозмущенной атмосфере воздушный тормоз находится в положении, соответствующем его средней эффективности. Угол наклона крутой глиссады зависит от посадочной массы ОК и выбирается так, чтобы обеспечивалось парирование внешних возмущающих воздействий заданной интенсивности во всем диапазоне возможных скоростей планирования; |
· в т о р о й - первое выравнивание (высота 500 м), на котором происходят интенсивное торможение и уменьшение скорости снижения ОК до значения, обеспечивающего комфортные условия посадки на ВПП;
т р е т и й - полет по пологой глиссаде с углом наклона -2 , на котором завершаются переходные процессы предыдущего участка и обеспечивается выход ОК на высоту начала заключительного выравнивания с заданными параметрами движения;
· ч ет в е р т ы й - заключительное выравнивание (собственно посадка), на котором с высоты 20 м реализуется траектория, строящаяся по экспоненциальному закону, традиционному для самолетной посадки, воздушный тормоз фиксируется в положении, соответствующем началу участка, а требуемые параметры движения в момент касания ВПП при действии возмущающих факторов обеспечиваются изменением геометрических параметров траекторий (эти параметры выбираются такими, чтобы при отсутствии внешних возмущений ОК приземлился на удалении 1000 м от кромки ВПП).
Приземление и пробег ОК происходят по сухой и мокрой бетонной ВПП, как в автоматическом, так и в ручном режиме управления при посадочной скорости Vпос=300 .330 км/ч, угле тангажа u=10 .13 , при попутном (до 5 м/с), встречном (до 20 м/с) и боковом (до 15 м/с) ветре. Управление пробегом до опускания передней стойки шасси выполняется в канале тангажа элевонами в режиме руля высоты, в путевом канале - рулем направления, а после опускания носового колеса - управляемой передней стойкой и дифференциальным растормаживанием колес основных стоек шасси.
|
Алгоритмы управления пробегом ОК сформированы так, что отказ одного из управляющих органов не приводит к потере управляемости и уводу с ВПП при различных сочетаниях ветровых возмущений и отклонений от оси ВПП. Большой объем статистического моделирования, полеты на аналоге и первый орбитальный полет ОК "Буран" подтвердили эффективность управления на пробеге, обеспечившего отклонение от оси ВПП в конце пробега до 5 м в автоматическом и ручном режимах. |
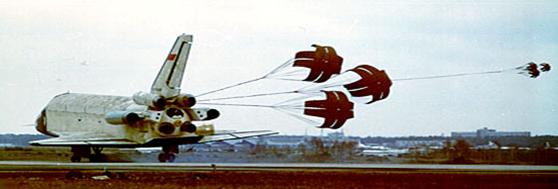
Торможение ОК осуществляется трехкупольным тормозным парашютом и тормозами колес основных стоек шасси, а также воздушным тормозом, используемым в качестве резервного при ручном управлении. Суммарный пробег в зависимости от направления и силы ветра и состояния поверхности ВПП не должен превышать 1800 м.
|
P.S.: |
Далеко не все поддерживали решение о проведении первых испытательных пусков "Бурана" в беспилотном, автоматическом режиме. За несколько месяцев до запуска в адрес Правительства было направлено коллективное письмо, подписанное, в том числе летчиками-космонавтами А.А.Леоновым и И.П.Волком, о том, что "Буран" не сможет надежно выполнить полет в автоматическом режиме и что первый полет, как и у американцев на "Спейс Шаттле", должен быть пилотируемым. Но специальная комиссия, рассмотрев состояние подготовки ОК, согласилась с предложением технического руководства о первом беспилотном пуске. |
Список использованной литературы:
1.Интернет www.buran.ru