Система электронного управления магнитно-резонансного томографа
Система электронного управления магнитно-резонансного томографа
МР томограф представляет собой сложную систему, состоящую из большого числа узлов различного назначения и размещенную на большой площади. Сказанное относится в первую очередь к МРТ с резистивным магнитом, которые имеют сложную энергетическую установку для питания главного магнита и систему водяного охлаждения. Что же касается узлов управления градиентной и РЧ системами, то они примерно одинаковы у всех типов МР томографов.
Учитывая, что выпускаются все три типа томографов, рассмотрим, как наиболее общую, структурную схему системы МРТ с резистивным магнитом (рис.1). В отличие от РКТ или УЗ сканеров, где некоторые системы (например, электромеханические узлы сканирования или механические датчики) работают автономно, в МРТ все субсистемы, участвующие в сборе и обработке информации, работают под управлением ЭВМ. Свои управляющие функции ЭВМ осуществляет через электронный блок управления тАУ крейт. Отсюда идут аналоговые и цифровые управляющие сигналы и команды в РЧ передатчик и источники питания градиентных катушек. В этих блоках генерируются сигналы большой мощности и выделяются значительные тепловые потери. Поэтому они оформлены в самостоятельные конструктивные узлы. Источники питания градиентной системы, по существу, представляют собой усилители мощности и размещены в шкафах в одном помещении с источником питания главного магнита. Там же находятся и основные узлы контроля системы охлаждения.
Магнитная система МРТ, которую по аналогии с блоком сканирующего устройства РКТ можно было бы назвать гентри, помещается в специальной комнате, пол, стены и потолок которой обтягиваются тонкой металлической сеткой. Она служит для защиты от помех, проникающих по эфиру от различных источников: станций радио- и телевещания, электротранспорта, местных источников, например мощных аппаратов УВЧ терапии и др. Тем не менее, помехи проникают и вносят искажения в МР-томограммы. И это объяснимо тАУ РЧ сигналы, получаемые от тканей организма, сравнимы по величине с электромагнитными колебаниями, приходящими из эфира и составляют десятки микровольт. Помехи могут проникать также из электросети. Для их подавления все силовые токи тАУ источников питания главного магнита, градиентной системы и передатчика тАУ пропускаются через фильтры. Этой же цели служит применение предварительного усилителя РЧ сигнала, расположенного в непосредственной близости от РЧ катушки для тела. Слабый РЧ сигнал, усиленный до нескольких милливольт с минимальной примесью помех, поступает в крейт, где дополнительно усиливается.
Системе водяного охлаждения отводится важная роль. Вода используется для отвода тепла не только от катушек главного магнита, но и от нагруженных силовых элементов источников питания главного магнита и градиентных систем. Применяют два типа систем водяного охлаждения: статическую и динамическую. В статической системе вода закачивается в резервуар, расположенный на высоте 9-го тАУ 10-го этажа, т.е. создается давление около 3 тАУ 4 атм. Резервуар имеет емкость, достаточную для работы МРТ в течение 1 часа. Динамическая система проще, так как вода подается в систему охлаждения непосредственно из водопроводной сети насосом. Однако стабильность напора воды в ней хуже, а при авариях в водопроводной сети или в системе охлаждения обследование приходится сразу прерывать.
Как и в системе РКТ, в МРТ применяют два монитора: цветной общего назначения и полутоновый черно-белый для вывода изображения. Для получения твердой копии изображения применяют различные принтеры тАУ лазерные, тепловые и другие, которые дают черно-белые (или других оттенков) полутоновые изображения.
Рисунок 1. Структурная схема системы МРТ с резистивным магнитом.
Особенностью системы управляющих команд МРТ по сравнению с РКТ и ультразвуковыми сканерами является большой удельный вес аналоговых сигналов. К ним относятся, прежде всего, радиочастотные посылки (несущие колебания и огибающая) и аналоговые напряжения для управления градиентной системой, а также некоторые вспомогательные сигналы. Роль цифровых сигналов в основном сводится к управлению аналоговыми сигналами и формированию временных интервалов. Разумеется, аналоговый РЧ сигнал, принимаемый антенной, преобразуется в цифровой. В основном все сигналы и данные измерения, передаваемые на исполнительные устройства и в ЭВМ, вырабатываются в крейте, структурная схема которого приведена на рис.2.
Контроллер предназначен для организации обмена данными между крейтом и ЭВМ. Он обеспечивает адресацию блоков крейта, трансляцию данных из ЭВМ, прием оцифрованного МР сигнала в последовательном коде по двум каналам, преобразование его в параллельный и ввод в ЭВМ в режиме прямого доступа к памяти. С целью ускорения преобразования вида изображения в нем могут быть предусмотрены для этого аппаратные средства. Например, сравнительно просто и быстро на аппаратном уровне выполняется инверсия изображения Влпозитив-негативВ» с помощью элементов ВлИсключающее ИЛИВ».
Большинство блоков крейта требует для своего функционирования разнообразных импульсов различной частоты и длительности. Их поставляет программатор импульсов, который, в свою очередь, получает необходимую информацию об этих импульсах от контроллера.
В программаторе уровней с помощью нескольких ЦАП, на которые подаются цифровые коды, формируются аналоговые напряжения, предназначенные для задания уровней градиентов, формы огибающей РЧ импульса и ряда других аналоговых сигналов, о которых будет сказано ниже. Так как аналоговых сигналов требуется много, то программатор уровней конструктивно может быть размещен на двух платах.
В радиочастотном блоке находится задающий генератор радиочастотного возбуждающего сигнала, устройство смещения радиочастоты, оконечный усилитель МР сигнала и его детектор.
Блок выбора слоя тесно связан с блоком РЧ, так как в нем формируются необходимые сигналы для организации смещения РЧ частоты и огибающая РЧ импульса.
Хотя индуктивности градиентных катушек сравнительно невелики (несколько десятков мкГн), при подаче градиентных импульсов с крутыми фронтами в них могут возникать нежелательные переходные процессы. В блоке коррекции градиентов происходит автоматическое преобразование прямого фронта напряжения, поступающего от программатора импульсов, в напряжение с линейным фронтом и оптимальной скоростью нарастания, при которой переходный процесс минимален.
Наконец, в блоке АЦП и фильтров формируется цифровой результат преобразования МР-сигнала. Фильтры служат для выбора полосы пропускания, в которой принимается сигнал от выбранного слоя, т.е. в полосе частоты смещения. Таких блоков в крейте также может быть два (два информационных канала).
Как видим из структурной схемы крейта, управляющая электроника МРТ не очень сложна. Во всяком случае, УЗ сканер по насыщенности различными управляющими электронными устройствами значительно превосходит МР томограф. Сложность МРТ заключается в его магнитной системе и программном обеспечении.
Из электронных узлов, обеспечивающих действие системы, наибольший интерес представляют блоки радиочастотной группы. Рассмотрим более подробно задачи, которые она выполняет. Структурная схема, отражающая связь и взаимодействие этой группы блоков изображена на рис.3. Одним из главных требований, предъявляемых к РЧ блоку, является высокая стабильность радиочастоты, что обеспечивается применением кварцевого задающего генератора, который вырабатывает сигнал с частотой f0, определяемой равенством Лармора. Поэтому смещение этой частоты при выборе слоя осуществляется не прямым способом, а путем косвенных нелинейных преобразований, например смешиванием сигналов частоты f0 и частоты смещения.
Смещенный сигнал усиливается по напряжению и по мощности в блоке передатчика, модулируется огибающей с заданным законом изменения и поступает на РЧ катушки по общему коаксиальному фидеру. Соответственно их пространственному расположению пары катушек называются вертикальной (ВК) и горизонтальной (ГК) Для получения вращающегося магнитного поля в цепях каждой пары катушек имеются фазосдвигающие звенья, которые создают сдвиг фаз их токов в 90о.
МР сигнал, получаемый от тела, снимается с тех же катушек, которые служат для возбуждения, и поступает по двум каналам в предварительный усилитель, расположенный поблизости. В нем сигналы каналов объединяются и по общему коаксиальному кабелю приходят на оконечный усилитель МР сигнала. Как было показано, для возбуждения катушек на них подаются большие (сотни вольт) напряжения. Поэтому должны быть предусмотрены меры по защите предусилителя МР сигнала от перенапряжений по входу. При приеме сигнала РЧ катушки, имеющие относительно малое входное сопротивление, могут оказывать шунтирующее действие. Для его исключения также принимают различные меры тАУ нелинейные элементы, коммутирующие устройства, которые отключают РЧ катушки при приеме МР сигнала.
Объединенный МР сигнал детектируется синхронным детектором, который управляется напряжением задающего генератора. В синхронном детекторе МР сигнал разделяется на два канала U и V, сигналы которых находятся в квадратуре (сдвинуты по фазе на 90о) и, по сути, представляют собой физическое воплощение представлений о вращающейся системе координат и ее параметров u и v. Поэтому выбор символов для обозначения каналов не случаен. Далее эти сигналы поступают в два канала АЦП. Применение синхронного детектора продиктовано очень малой величиной МРС. Как известно из теории радиоприема, синхронный детектор обладает хорошей помехоустойчивостью и избирательностью.
Рисунок 3. Блоки радиочастотной группы.
Электронные блоки радиочастотной группы конструктивно могут находиться в различных местах. Например, задающий генератор, устройства смещения частоты, оконечный усилитель МРС и детектор могут находиться в блоке РЧ, формирователи сигналов смещения частоты и огибающей тАУ в блоке выбора слоя. Эти два блока находятся в крейте. Передатчик и предусилитель МРС являются отдельными самостоятельными блоками.
РЧ катушки. Упрощенные схемы цепей катушек для тела и для головы изображены на рис.4. Катушки для тела, как уже говорилось, образуют две ортогонально расположенные пары тАУ горизонтальную (ГК) и вертикальную (ВК).
Напряжение возбуждения на катушки подается по общему коаксиальному фидеру. Для сдвига фаз токов на 90о в цепи горизонтальной и вертикальной пар включены соответственно индуктивность L1 и емкость С1. Для защиты от перегрузок по напряжению входов предварительного усилителя и устранения шунтирующего действия передатчика используются встречно-параллельные пары диодов. При возбуждении катушек через диоды протекают большие токи и их сопротивления малы. При этом диодные пары, включенные на входах усилителя, играют роль двухсторонних амплитудных ограничителей. Для слабых же МР сигналов диоды представляют собой большие сопротивления, благодаря чему диодные пары, включенные в цепи катушек за фидером, как бы отключают их от передатчика. Помеха, возникающая на входах усилителя, хотя и уменьшенная диодными ограничителями, все-таки остается слишком большой (0,7 В). Поэтому на практике применяют более сложные способы подавления помех.
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа а бВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа
Рисунок 4. РЧ катушки: для тела (а) и головная (б).
Катушка для головы надевается непосредственно на голову пациента и подключается к предварительному усилителю коротким коаксиальным кабелем с разъемом. Она состоит из двух секций, каждая из которых содержит пару катушек тАУ сигнальную (L1) и компенсирующую (L2). Эти катушки находятся в непосредственной близости друг от друга и имеют почти стопроцентное сцепление. При возбуждении излучающей системы (катушки для тела) в сигнальной катушке L1 наводится сильная помеха. Для ее компенсации и служит катушка L2. В ее цепи возникает большой ток, создающий размагничивающее поле для L1 и тем самым компенсирующее помеху. По окончании РЧ импульса сопротивление диодной пары становится большим и на слабый МР сигнал катушка L2 не оказывает шунтирующего действия. Этой же цели служит нелинейная индуктивность L3.
Для исследования области спины применяется отдельная катушка в виде плоской рамки. Переключение входов предварительного усилителя на тот или иной источник сигнала (антенну) осуществляется с помощью контактного переключателя.
Предварительный усилитель МР сигнала предназначен для усиления очень слабых РЧ откликов, поэтому к нему предъявляются повышенные требования в части собственных шумов. Это требование удовлетворяется, как и в видеоусилителях рентгеновских телевизионных систем, применением во входных каскадах малошумящих полевых транзисторов. Но в отличие от видеоусилителя предварительный усилитель МРС принимает узкополосный сигнал, поэтому от внешних и внутренних помех можно дополнительно отстроиться с помощью селективных цепей. Одна из возможных схем предварительного усилителя МРС приведена на рис.5.
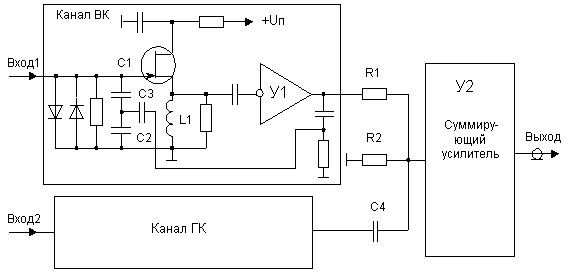
Рисунок 5. Предварительный усилитель МР сигнала.
Сигналы от РЧ катушек поступают на входы 1 и 2 ВлвертикальногоВ» и ВлгоризонтальногоВ» каналов. Сильные сигналы (помехи), возникающие при возбуждении катушек, ограничиваются двусторонними диодными ограничителями, которые уже были показаны на рис.4. В каждом канале сигналы усиливаются повторителем на малошумящем полевом транзисторе (например, КП307) и усилителем напряжения У1, который может быть выполнен на быстродействующем операционном усилителе. Нагрузкой повторителя служит дроссель L1. Его сопротивление переменному току будет большим, а сопротивление постоянному тАУ маленьким. Поэтому напряжение затвор-исток полевого транзистора оказывается практически равным нулю. Крутизна транзистора будет при этом максимальной.
Для повышения стабильности усиления каждый канал охвачен параллельной отрицательной ОС через емкости С1, С2, С3, а дроссель для повышения устойчивости схемы зашунтирован высокоомным сопротивлением.
Так как сигналы каналов ВК и ГК находятся в квадратуре, то при их простом объединении на входе суммирующего усилителя амплитуда результирующего сигнала была бы только в  Вараз больше амплитуды одного из них. Во избежание потери усиления их фазы сдвигаются соответственно на -45о и +45о с помощью фазосдвигающей цепочки R1, R2, C4, поскольку, как это видно из рис.4, напряжение в канале ГК отстает от напряжения в канале ВК. Таким образом, на входе усилителя они оказываются в одной фазе. Как правило, общее усиление предварительного усилителя составляет около 2000. При этом его выходное напряжение получается равным примерно 40 мВ, что косвенным образом свидетельствует об очень малой величине МРС (В»20 мкВ).
Вараз больше амплитуды одного из них. Во избежание потери усиления их фазы сдвигаются соответственно на -45о и +45о с помощью фазосдвигающей цепочки R1, R2, C4, поскольку, как это видно из рис.4, напряжение в канале ГК отстает от напряжения в канале ВК. Таким образом, на входе усилителя они оказываются в одной фазе. Как правило, общее усиление предварительного усилителя составляет около 2000. При этом его выходное напряжение получается равным примерно 40 мВ, что косвенным образом свидетельствует об очень малой величине МРС (В»20 мкВ).
Передатчиком в МРТ обычно называют многокаскадный усилитель мощности и модулятор. Особенность его работы заключается в том, что он должен развивать большую мощность в течение действия сравнительно короткого РЧ импульса при достаточно большой скважности (длительность РЧИ составляет 3 тАУ 8 мс, а длительность периода повторения обычно не менее 40 мс). Поэтому средняя выходная мощность передатчика сравнительно невелика. Тем не менее, для повышения надежности в его выходных каскадах применяют мощные высокочастотные транзисторы. В частности, разработчики охотно используют полевые транзисторы с изолированным затвором благодаря небольшой мощности, необходимой для их раскачки. Пример построения схемы передатчика показан на рис.6.
Рисунок 6. Передатчик РЧ сигнала.
Несущая со смещенной частотой непрерывно поступает от РЧ блока. Она не обязательно должна иметь форму гармонического колебания тАУ это может быть и прямоугольное напряжение (меандр). Главное требование, предъявляемое к ней тАУ стабильность частоты и амплитуды. Сигнал огибающей поступает от блока выбора слоя. Несущая усиливается двухтактным усилителем. Его первый каскад на транзисторах VT1, VT2 (резистивный) раскачивает мощный выходной каскад на полевых транзисторах с изолированным затвором VT7, VT8. Для согласования входного и выходного каскадов служат двухтактные эмиттерные повторители на комплементарных парах транзисторов VT3, VT4 и VТ5, VT6.
Модуляция осуществляется с помощью транзисторов VT9, VT10, которые управляют током специального источника питания. Такой способ питания называют Влплавающей землейВ» или ВлподземнымВ» источником. При отсутствии РЧИ потенциал точки а равен нулю, поэтому напряжение Uси полевых транзисторов также равно нулю, и ток в цепи РЧ катушек отсутствует. Поступающий от формирователя огибающей сигнал открывает транзисторы VT9, VT10, и потенциал точки а понижается. Это приводит к отпиранию транзисторов VT7, VT8 и возбуждению тока в РЧ катушках. Рассмотренный способ модуляции аналогичен анодной или коллекторной модуляции. Он характеризуется высокой линейностью воспроизведения огибающей в широком динамическом диапазоне, но требует большой мощности от модулятора. Для обеспечения пропорциональности между управляющим сигналом огибающей и выходным напряжением модулятора усилитель огибающей охватывают глубокой отрицательной ОС по напряжению.
Для работы в выходном каскаде передатчика подходят мощные полевые транзисторы КП904А, Б с максимальной мощностью рассеяния 75 Вт и минимальной крутизной около 250 мА/В. При выходном токе 1,4 А, взятом из ранее рассмотренного примера, потребуется напряжение Uзи = 1,4/0,25 = 5,6 В. Емкость затвор-исток этих транзисторов составляет около 200 пФ. На частоте 5 МГц их входной ток будет равен  ВаВ» 35 мА, т.е. ток получается достаточно большим. Но если бы использовать биполярные транзисторы, он был бы не меньше, а линейность была бы хуже.
ВаВ» 35 мА, т.е. ток получается достаточно большим. Но если бы использовать биполярные транзисторы, он был бы не меньше, а линейность была бы хуже.
Во вторичной цепи трансформатора Т2 включена пара встречно-параллельных диодов. Она, как и аналогичные пары в цепях РЧ катушек, служит для отключения выхода передатчика во время приема МР сигнала с целью предотвращения его шунтирования сравнительно малым выходным сопротивлением трансформатора.
Рассмотрим теперь более подробно устройство РЧ блока. Основными его частями являются генератор смещенной частоты и синхронный детектор МР сигнала. Структурная схема генератора приведена на рис.7.
ВаРисунок 7. Генератор сигналов смещенной частоты.
Принцип смещения частоты основан на тригонометрическом преобразовании
Ваcos(f0 В±fсм) = cos(f0) cos(fсм)  Ваsin(f0) sin(fсм),
Ваsin(f0) sin(fсм),
илиВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (1)
Ваsin(f0 В± fсм) = sin(f0) cos(fсм) В± cos(f0) sin(fсм).
В тригонометрических выражениях (1) для простоты вместо wt условно записаны частоты f. Таким образом, для смещения частоты f0 нужно выполнить операции умножения и сложения двух пар квадратурных гармонических функций. Нулевая частота смещения соответствует слою, проходящему через центр магнита. Для выбора слоя по разные стороны относительно центра в выражениях (1) следует менять знаки при вторых слагаемых. Физически для этого достаточно проинвертировать функцию sinfсм. Квадратурные сигналы с частотой f0 получают с помощью опорного генератора с частотой 2f0, делителя на 2 и фазосдвигающего устройства, обеспечивающего сдвиг фаз на 90о. Наиболее просто деление частоты на 2 и сдвиг фаз можно реализовать с помощью цифровых схем. Для этого можно использовать быстродействующие элементы типа ЭСЛ (эмиттерно-связанная логика) серий К500 или К1500. Эти микросхемы обладают также достаточно большой выходной мощностью. Деление частоты на 2 выполняется триггером, поэтому переменные напряжения частотой f0 имеют форму симметричных прямоугольных импульсов (меандра), что важно с точки зрения точности преобразования. Квадратурные сигналы с частотой fсм гармонической формы поставляет специальное формирующее устройство блока выбора слоя.
Функции перемножения и сложения выполняются с помощью аналоговых перемножителей (АП). При этом один из сомножителей является гармонической функцией, а другой - периодической негармонической. Гармонический сигнал с частотой f0 + fсм выделяют на параллельном колебательном контуре, подключаемом к выходам АП и настроенном на частоту f0. Впрочем, затем он может снова стать прямоугольным, если в качестве предварительного усилителя ПУ и оконечного каскада ОК использовать цифровые микросхемы К500 или К1500.
В качестве АП можно применить популярную микросхему К174ПС1. Она представляет собой аналоговый перемножитель общего применения с предельной частотой 220 МГц. Его выходное напряжение определяется выражением  , где Км тАУ масштабный коэффициент. Электрическая схема этого АП приведена на рис.8.
, где Км тАУ масштабный коэффициент. Электрическая схема этого АП приведена на рис.8.
Рисунок 8. Аналоговый перемножитель К174ПС1.
Регулятор фазы поддерживает точный сдвиг фаз в 90о между квадратурными сигналами с частотой f0. Это достигается применением АП (АП3) и фильтра нижних частот, в качестве которого используется интегратор. Выходное напряжение интегратора смещает потенциал на выходе фазосдвигающей цепи, которая представляет собой интегрирующую RC-цепь. В результате сдвигается во времени фронт импульса на входе одного из триггеров-делителей на 2. Регулятор охвачен обратной связью сигналами cosf0 и sinf0. В результате на выходе АП3 возникает переменное прямоугольное напряжение с частотой 2f0 (рис.9). При точном равенстве сдвига фаз 90о это напряжение будет иметь форму меандра, и поэтому выходное напряжение интегратора будет равно нулю.
Рисунок 9. Напряжение на выходе АП3.
Канал синхронного детектора показан на рис.10. МР сигнал от предварительного усилителя поступает на вход усилителя с управляемым коэффициентом усиления, который выполнен на АП (АП1). Сущность управления усилением состоит в том, что один из входных сигналов представляет собой постоянное напряжение, подаваемое от блока программатора уровней. В частности, при возбуждении РЧ катушек, когда на входе этого усилителя возникает большой сигнал, на управляющем входе на некоторое время устанавливается нулевой уровень. Это приводит к блокировке усилителя.
Рисунок 10. Синхронный детектор МР сигнала.
Первая гармоника сигнала cos(f0+fсм) выделяется на колебательном контуре и детектируется синхронным детектором, который выполнен также на аналоговых перемножителях. На их сигнальные входы подается один и тот же сигнал cos(f0+fсм), а на опорные входы тАУ квадратурные опорные сигналы cosf0 и sinf0. Спектры выходных сигналов АП2 и АП3 описываются выражениями (2.13) и представляют собой биения колебаний. Фильтры нижних частот выделяют из этих биений низкочастотные составляющие cosfсм и sinfсм, которые несут информацию о параметрах, характеризующих локальные свойства тканей. Эти сигналы усиливаются и поступают в каналы U и V аналого-цифровых преобразователей.ВаВаВаВаВаВа
Ранее отмечалась высокая помехоустойчивость синхронных детекторов. Действительно, если в принимаемом сообщении кроме полезной составляющей с частотой f0+ fсм имеется также помеха с частотой fп, близкой к f0, то, например, первое равенство системы (2.13) будет иметь вид
cos(fп+fсм) ´ сosf0 = [cos(f0+fп+fсм) + cos(fп-f0+ fсм)].
[cos(f0+fп+fсм) + cos(fп-f0+ fсм)].
Если fп>f0 , то fп-f0+ fсм > fсм , и помеха оказывается за пределами полосы пропускания фильтра.
В режиме тестирования томогорафа, когда МР сигналы не принимаются, вход усилителя размыкается контактами реле, которое управляется специальным сигналом ВлТестВ».
Конечным пунктом назначения МР сигнала в усилительном тракте являются АЦП каналов U и V. Перед каждым АЦП устанавливают фильтр НЧ с управляемой полосой пропускания, которая задается в соответствии с частотой смещения. В отличие от УЗ сканеров или цифровых РТС для цифрового преобразования МР сигнала, в принципе, не требуется сверхскоростной АЦП. Действительно, МР сигнал (тот, который считывается) длится около 8 мс. За это время требуется обычно сделать 256 отсчетов. Следовательно, время одного отсчета составляет примерно 30 мкс. Это время преобразования АЦП последовательного приближения типа К1113ПВ1, который представляет собой стандартную микросхему, имеющую все необходимое для сопряжения с ЭВМ. К тому времени, когда началась разработка первого российского МР томографа ВлОбраз-1В», эта микросхема уже выпускалась. Тем не менее, разработчики применили АЦП со структурой К1113ПВ1, но выполненный из нескольких отдельных элементов: регистр последовательного приближения (РПП), ЦАП, компаратор. Вероятно, разработчиков не устраивала разрядность К1113ПВ1 тАУ 10, что давало точность преобразования в 0,1%. При использовании 12-разрядного РПП типа К155ИР17 точность увеличивается в 4 раза.
Структурная схема одного канала АЦП с фильтром нижних частот показана на рис.11. Фильтр нижних частот выполнен в виде двухкаскадного активного фильтра
Рисунок 11. Канал АЦП и фильтра МР сигнала.
с характеристикой Баттерворта, обеспечивающей меньшие частотно-фазовые искажения, чем другие характеристики (например, Чебышева). Изменения полосы пропускания фильтра осуществляется коммутацией элементов R, C аналоговым коммутатором.
Передаточная характеристика одного каскада ФНЧ имеет вид
K(jw) =
=  ,
,
т.е. каскад является звеном второго порядка, а фильтр в целом имеет четвертый порядок. Обычно число полос пропускания фильтра выбирают так, чтобы обеспечить их взаимное перекрытие в диапазоне от тАУfсм.макс до +fсм.макс.Например, если частота смещения изменяется в пределах В± 8 кГц относительно f0, что соответствует максимальным расстояниям выбираемого слоя от центра магнита, то максимальная ширина полосы фильтра будет равна 16 кГц. При этом ее удобно изменять с шагом 1 кГц.
С выхода фильтра сигнал поступает на устройство выборки-хранения (УВХ), где запоминается его дискретный отсчет на время преобразования АЦП. Цифровые данные каналов U и V через мультиплексор контроллера крейта передаются в ЭВМ. Над этими данными выполняются преобразования Фурье и определяются амплитуды и фазы отдельных гармоник:
 Ваи
Ваи  .
.
Современные средства электроники позволяют уменьшить размеры этого блока и одновременно улучшить его характеристики. Можно, например, использовать 12 тАУ 16-разрядные быстродействующие АЦП зарубежных фирм, а вместо аналоговых фильтров, дискретность и избирательность которых не всегда удовлетворяют разработчиков, - специальные сигнальные процессоры. Например, на базе микросхемы MCS 296 можно построить цифровой фильтр практически с любой характеристикой.
Блоки выбора слоя и программатора уровней находятся в стадии непрерывного развития и совершенствования. При их разработке возможно много альтернативных решений, и главной задачей является выбор оптимальной конфигурации. Для выбора слоя необходима достаточная точность формирования квадратурных сигналов смещения частоты f0 и огибающей РЧ импульса и в то же время возможность их плавного регулирования. Поэтому обычно применяют смешанные аналого-цифровые способы формирования этих сигналов, например, функции квадратурных сигналов (синус и косинус) и огибающих хранят в ПЗУ, а управление их частотой и амплитудой осуществляют с помощью аналоговых сигналов тАУ уровней.
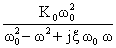
На рис.12 приведена структурная схема устройства формирования сигналов для управления частотой смещения. Формирование этих сигналов осуществляется путем двойного преобразования: сначала аналоговый уровень UF преобразуется с помощью интегратора DA1 в пилообразное напряжение, которое служит тактовой частотой для счетчика, а затем с помощью ПЗУ и ЦАП формируют функции косинуса и синуса сигналов смещения. Уровень UF поставляется блоком программатора уровней, где он, в свою очередь, формируется с помощью ЦАП на основе цифровых данных, поступающих из ЭВМ.
Для запуска интегратора по специальной команде размыкается ключ S1 и начинается заряд конденсатора С1. При положительном UF на выходе DA1 будет отрицательное линейно-изменяющееся напряжение (ЛИН), а при отрицательном UF тАУ положительное ЛИН. Сброс интегратора производится с помощью компараторов К1, К2 и одновибраторов ОВ1, ОВ2. При этом замыкается ключ S2 ( S3), и конденсатор С2 (С3), предварительно заряженный от источника +Uоп1 (-Uоп1) разряжает конденсатор С1. Таким образом, формируется пилообразное напряжение. Его частота определяется формулой
 ,
,  Ва= R1C1.
Ва= R1C1.
Импульсы одновибраторов тактируют реверсивный счетчик, причем при отрицательном UF, работает ОВ1, и счетчик считает в прямом направлении, а при положительном тАУ ОВ2, и счетчик считает в обратном направлении. Его цифровые данные служат младшими адресами для ПЗУ, в которых хранятся функции синуса и косинуса. Эти функции могут иметь группы с различными фазами. Для выбора группы с требуемой фазой служат дополнительные старшие разряды адреса, задаваемые извне. На схеме показано два таких разряда, т.е. предполагается, что в ПЗУ имеется 4 группы функций с разными фазами. Таким образом, каждая группа состоит из 256 отсчетов. Это означает, что при максимальной частоте смещения 8 кГц частота тактовых импульсов, т.е. частота пилообразного напряжения, будет равна 8×256 = 2048 кГц. Изменение знака UFи реверс счетчика приводят к изменению и знака частоты смешения.
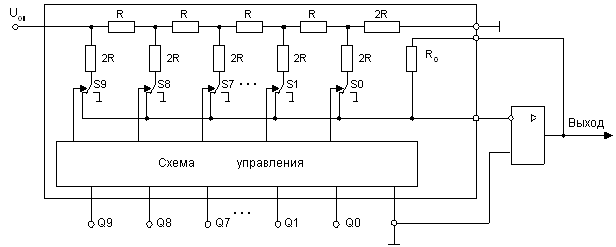
Чтобы лучше понять, как формируются квадратурные функции с частотой смещения, кратко рассмотрим устройство и принцип действия так называемого перемножающего ЦАП К572ПА1, который здесь используется (читатели, знакомые с этой микросхемой могут пропустить это описание). Основу микросхемы К572ПА1 составляют резистивная матрица R-2R и коммутирующие ключи (рис.13). Благодаря выбору соотношения резисторов матрицы R-2R ток источника опорного напряжения убывает в 2 раза в резисторах 2R по мере приближения к операционному усилителю.
Рисунок 13. Перемножающий ЦАП типа К572ПА1.
Эти токи суммируются в резисторе обратной связи R0. В зависимости от положения ключей S9тАжS0 ячейки матрицы вносят или не вносят свой вклад в общий выходной сигнал, который определяется выражением
 , (2)
, (2)
где n тАУ разрядность ЦАП, Qi тАУ бит (0 или 1 в зависимости от положения ключа). Величина R0 обычно равна R.
Так как ключи, управляющие резистивной матрицей тАУ транзисторы типа КМОП, то полярность опорного напряжения Uоп может быть любой. Более того, это напряжение может изменяться одновременно с цифровым кодом. Тогда, как видно из формулы (2), выходное напряжение будет пропорционально произведению числа, эквивалентного цифровому коду, и опорного напряжения. Поэтому ЦАП такого типа называют перемножающим (или умножающим). На его основе можно строить функциональные преобразователи, например, амплитудные модуляторы и др.
Так как этот ЦАП (как, впрочем, и другие) Влне понимаетВ» знака цифрового кода, то величины синусов и косинусов в ПЗУ приходится хранить смещенными на 1, т.е. в виде cosx +1 и sinx +1. В действительности единица означает просто половину максимального числа, хранимого в ПЗУ. Если, например, числа тАУ восьмиразрядные слова, то максимальное число равно 255, а половина его тАУ128 (или 10000000 в двоичном коде). В связи с таким представлением функций косинуса и синуса при выводе их в виде напряжений приходится смещать постоянную составляющую. Это делается с помощью сумматоров на операционных усилителях. Таких сумматоров два. Оба они объединяют сигналы и косинуса и синуса. В результате получаются квазигармонические квадратурные функции cos(wсмt+j) и sin(wсмt+j). Смещение постоянной составляющей осуществляется двумя способами: у ЦАП2 и ЦАП3 - с помощью постоянного напряжения Uоп3, которое их же и питает, а у ЦАП1 и ЦАП4 - импульсным способом. Он заключается в том, что на вход опорного напряжения (Ref) и на вход соответствующего сумматора подается одно и то же пилообразное напряжение. В ЦАП1 и ЦАП4 пилообразный сигнал перемножается с функцией синуса или косинуса и таким образом получается пилообразное напряжение, модулированное по закону синуса или косинуса. Операционный усилитель ЦАП инвертирует полярность произведения этих двух функций.
ВаВаВаВаВаВаВаВа Преобразования, выполняемые над функциями цифро-аналоговыми преобразо-вателями и сумматорами, удобно представить в виде условной стуктурно-алгоритмической схемы, приведенной на рис.14. В ней учитывается инверсия функций операционными усилителями ЦАП и сумматорами. Опорное напряжение Uоп3, подаваемое на сумматоры для компенсации постоянных составляющих, условно обозначены как Вл+1В». Пилообразному напряжению соответствует функция kt.
На рис 15 показано, как происходит компенсация постоянной составляющей на выходе ЦАП1, обусловленная смещением функции синуса. Эпюры 1, 2, 3 соответствуют напряжению на выходе ЦАП1, пилообразному напряжению на его входе Ref и синусной составляющей на выходе сумматора. Так как среднее за период значение пилообразной функции равно половине ее амплитуды, то после НЧ фильтрации, которая может быть выполнена в самом сумматоре, амплитуда синусоиды на его выходе будет в 2 раза меньше амплитуды функции, хранящейся в ПЗУ. Аналогично обстоит дело и с косинусоидой на выходе второго сумматора.
Таким образом, сигналы на выходах сумматоров условно можно представить в где