Методика проектування пристроiв синхронiзацii
Содержание
Вступ
1. Методика проектування пристроiв синхронiзацii
1.1 Будова iнформацiйноi моделi
1.2 Вибiр алгоритму пошуку
1.3 Визначення способiв вирiшення завдань для досягнення мети побудови пристрою синхронiзацii
1.4 Вибiр способу синхронiзацii, способу вимiру параметрiв синхронiзацii та спосiб подачi команди на включення вимикача генератора
2. Вибiр способу формування команди на включення генератора способом точноi синхронiзацii
2.1 Вибiр способу подачi команди
2.2 Вибiр способу вимiру частоти ковзання
3. Способи одержання постiйного часу випередження
3.1 Кiнцево-рiзнiсний спосiб
3.2 Часовий спосiб одержання постiйного часу випередження
3.3 РЖмпульсний спосiб одержання постiйного часу випередження
3.4 Дискретний спосiб одержання постiйного часу випередження
3.5 Спосiб затримки i зсуву по фазi синхронiзуiмих напруг
4. Вибiр структурноi схеми синхронiзатора
4.1 Розробка структурноi схеми
4.2 Вибiр блокiв принциповоi схеми
Закiнчення
Вступ
Однiiю з найбiльш вiдповiдальних операцiй пiд час вмикання синхронного генератора на паралельну роботу i його синхронiзацiя. Незважаючи на велику практичну значимiсть цiii операцii, iнформацiя про засоби ii реалiзацii дуже обмежена й у багатьох випадках становить комерцiйну таiмницю. Це стримуi прогрес у данiй галузi, ускладнюi прийняття правильних рiшень при проектуваннi та не сприяi виключенню помилок пiд час проведення включень генераторiв на паралельну роботу. В теперiшнiй час для вирiшення завдання вибору пристрою синхронiзацii та забезпечення потрiбноi якостi електричноi енергii в цьому процесi, проводять дорогi натурнi експерименти, якi не завжди дозволяють правильно вирiшити поставлене завдання. Особливу важливiсть питання розробки синхронiзаторiв набуваi сьогоднi, коли маi мiсце тенденцiя до децентралiзацii електропостачання, пов'язана iз широким впровадженням автономних електроустановок. Прискорення синхронiзацii i дiiвим засобом усунення можливих аварiйних ситуацiй в автономнiй енергосистемi, в якiй низька точнiсть при включеннi генераторiв та помилковi дii персоналу або пристроiв автоматики пiд час здiйснення цього процесу можуть тiльки погiршити стан. Основним напрямком удосконалення пристроiв автоматики енергосистем i пiдвищення iх технiчних характеристик i надiйностi, впровадження сучасноi елементноi бази, запобiгання можливостi виникнення аварiйних режимiв. Пристроям синхронiзацii, якi застосовуються в даний час, у бiльшостi випадкiв властива низька точнiсть вiдпрацьовування моменту подачi команди на вмикання генератора. У зв'язку з цим у системi електропостачання можливi провали напруги й кидки струму, що викликають збоi в роботi основного обладнання, та можуть призвести до непоправних втрат. Процес синхронiзацii затягуiться, що, у свою чергу, ускладнюi локалiзацiю негативних наслiдкiв аварiйних режимiв.
1.
Методика проектування пристроiв синхронiзацii
Пристроi автоматичноi точноi синхронiзацii вiдносяться до класу складних штучних систем. Завдання синтезу складноi системи складаiться у визначеннi ii характеристик i структури шляхом вибору варiанта з декiлькох альтернатив. Завдання синтезу системи являi собою завдання ii проектування. При проектуваннi синхронiзатора доводиться ставити й вирiшувати всi завдання, якi формуються теорiiю систем, що i методологiчною базою теорii проектування. У процесi проектування синхронiзатора необхiдно встановити взаiмозв'язок мiж його структурою, внутрiшньою органiзацiiю й взаiмодiiю утворюючих його компонентiв з функцiями, якi вiн повинен виконувати, тобто одержати впорядковану iнформацiю про об'iкт, що не iснуi на момент початку проектування. У цей час процес створення пристроiв автоматичноi точноi синхронiзацii найчастiше ведеться шляхом проб i помилок. Власне пристрiй i процес його створення не формалiзуються, у символiчнiй формi не описуються, у зв'язку iз чим синхронiзатори неможливо дослiджувати й змiнювати без проведення експерименту iз самим виробом. Методи оптимiзацii, як унiверсальний математичний апарат теорii систем, не використаються при рiшеннi проектних завдань. У зв'язку iз цим розроблювальнi пристроi не позбавленi концептуальних, системотехнiчних помилок, найнебезпечнiших по своiх наслiдках. Очевидно, що постала необхiднiсть доповнення iнтуiтивного системного аналiзу процесу проектування синхронiзаторiв правилами, сформульованими як на вербальному, так i на математичному рiвнi.
Процес проектування будь-якоi технiчноi системи, по сутi, являi собою процес переробки вихiдноi iнформацii, утвореноi вiдомостями, що отримуiться в технiчному завданнi й нормативних документах в iнформацiю, що утворить проект системи.
1.1 Будова iнформацiйноi моделi
У процесi проектування будуiться iнформацiйна модель S створюваноi реальноi системи, яку можна представити сукупнiстю наступних множин:
![]() Ва(1.1)
Ва(1.1)
де А - множина елементiв, що дають iнформацiю про зовнiшнi середовище, що дii на проектовану систему; В - множина елементiв, що дають iнформацiю про проектовану систему; С - множина елементiв, що дають iнформацiю про зв'язки мiж компонентами проектованоi системи i ii зв'язкiв iз зовнiшнiм середовищем; D - множина елементiв, що дають iнформацiю про якостi системи, обумовлених факторами зовнiшнього середовища, складом системи i ii зв'язкiв.
Процес створення iнформацiйноi моделi (1.1) складаiться з ряду послiдовно виконуваних етапiв, що утворюють фазу аналiзу й фазу синтезу. Фаза аналiзу мiстить у собi операцii постановки мети, розбивки на пiдзадачi, формулювання локальних цiлей i встановлення способiв iхнього досягнення, обТСрунтування критерiiв ефективностi як засобiв досягнення локальних цiлей, розробка концепцii системи на основi дослiдження альтернатив. Фаза синтезу включаi етапи ескiзного, технiчного й робочого проектування.
Процес проектування реалiзуiться вiдповiдно до описаного плану й фактично являi собою процес рiшення деякого завдання в ходi розумовоi дiяльностi людини i чим точнiше вдаiться вiдобразити мислення людини, тим ефективнiше проектний алгоритм. Будемо виходити з того, що:
абстрактний механiзм мислення функцiонально подiбний до деяких процедур, описуваних багаторiвневими структурами й процесами, якi розгалужуються;
абстрактний механiзм мислення функцiонально подiбний до переходу у процесi, що розгалужуiться, вiд початку до кiнця й усунення в цьому процесi вузлiв, по тим або iншим причинам, що i безперспективними в планi досягнення поставленоi мети.
Уведемо поняття стану проектованоi системи, пiд яким будемо розумiти такий стан iнформацiйноi моделi системи ![]() Вав кожний момент проектування
Вав кожний момент проектування ![]() , де
, де ![]() Ва- множина етапiв проектування вiд початкового
Ва- множина етапiв проектування вiд початкового ![]() Вадо кiнцевого
Вадо кiнцевого ![]() , котре характеризуiться значеннями елементiв множин А, В, С, D. Стан системи
, котре характеризуiться значеннями елементiв множин А, В, С, D. Стан системи ![]() Вапредставимо вершиною графа. Дугами графа будемо представляти переходи вiд вершини
Вапредставимо вершиною графа. Дугами графа будемо представляти переходи вiд вершини ![]() Вадо вершини
Вадо вершини ![]() , розумiючи пiд переходом оператор перетворення стану проектованоi системи.
, розумiючи пiд переходом оператор перетворення стану проектованоi системи.
Таким чином, оператор перетворення являi собою деяку процедуру, у результатi якоi приймаiться проектне рiшення й змiнюються значення елементiв множин А, В, С, D. По своiй сутi оператор перетворення являi собою проектну методику. Запропонований граф, описуваний моделлю S, показуi, як у процесi проектування здiйснюються переходи вiд вихiдного стану ![]() Вачерез промiжнi стани
Вачерез промiжнi стани ![]() Вадо кiнцевого стану
Вадо кiнцевого стану ![]() , що i завершеним проектом системи.
, що i завершеним проектом системи.
На кожному промiжному станi ![]() Ваi декiлька альтернатив переходу в наступний стан. Цi альтернативи й утворять розгалужений граф.
Ваi декiлька альтернатив переходу в наступний стан. Цi альтернативи й утворять розгалужений граф.
Особливiстю утвореного в такий спосiб розгалуженого графа i те, що, як правило, кiнцевий стан системи найчастiше представляiться неявними множинами, обумовленими властивостями системи, що задовольняють поставленим цiлям. Тим самим у представленому розгалуженому графi умови досягнення мети повиннi бути описанi у виглядi вимог технiчного завдання, а оператори, що розкривають неявно заданий граф в просторi станiв, являють собою варiанти альтернативних рiшень.
1.2 Вибiр алгоритму пошуку
Алгоритми пошуку на неявно заданому графi утворенi алгоритмами повного перебору й алгоритмами, що використають iнформацiю про розв'язуване завдання.
До першоi групи алгоритмiв прийнято вiдносити алгоритми, у яких використаiться пошук у глибину, пошук завширшки, пошук завширшки з iтерацiiю по глибинi. Для алгоритмiв другоi групи прийнято вводити оцiнну функцiю, що i мiрою, яка показуi успiшнiсть руху по графi в обраному напрямку з погляду руху мети.
До алгоритмiв другоi групи, якi доцiльно використати для рiшення проектних завдань, варто вiднести алгоритми найшвидшого спуску, алгоритм галузей i границь i алгоритм, що використаi в оцiннiй функцii не тiльки трудомiсткiсть уже пройденого шляху, але й мiру вiдстанi до цiльових вершин.
Розглянемо з позицiй викладений процес проектування пристрою автоматичноi точноi синхронiзацii. Для визначення значення елементiв множин А, В, С, D вершини графа розглянемо, як змiнюiться модель у процесi проектування, тобто в просторi станiв, яким вiдповiдають рубежi розв'язуваних завдань (пiдзавдань). Будемо виходити з того, що точне моделювання процедур рiшення пiдзавдань проектування у вузлах графа неможливо, у зв'язку iз чим варто роздiлити завдання, розв'язуванi людиною, i завдання, розв'язуванi комп'ютером. До компетенцii людини в розглянутому випадку ставиться формулювання мети, завдань i пiдзавдань. Комп'ютер повинен проводити вибiр з вiдомого набору альтернатив, здiйснення обраноi дii, оцiнку ситуацii й вибiр наступного кроку. При виборi альтернатив вирiшальним правилом i можливiсть досягнення мети, порiвнюючи при цьому ступiнь зменшення деяких небажаних ефектiв i виходячи з необхiдностi рiшення вартого завдання або пiд - завдання. У процесi рiшення варто враховувати накопичений досвiд i прагнути до пошуку ключовоi дii, виходячи з аналiзу ситуацii й крiм нездiйсненного варiанта.
При оцiнцi ситуацii, з огляду на те, що завдання й пiдзавдання визначенi, необхiдно оцiнити кiлькiсть зусиль, затрачуваних на рiшення завдання (пiдзавдання), використовуючи для цього чисельнi оцiнки за математичними критерiями або iх верхнi й нижнi границi (наприклад, вартiснi оцiнки або iншi оцiнки очiкуваного виграшу).
При виборi наступного кроку необхiдно виходити з останньоi породженоi ситуацii й рiшення шукати шляхом компромiсу мiж глибиною пошуку й складнiстю оцiнки ситуацii. Стосовно до проектування синхронiзатора цiлями можуть служити точнiсть роботи пристрою, обумовлений кутовою помилкою, помилкою визначення частоти ковзання й помилкою визначення моменту формування команди на включення вимикача генератора, а також технiчна складнiсть реалiзацii пристрою i його вартiсть.
1.3 Визначення способiв вирiшення завдань для досягнення мети побудови пристрою синхронiзацiiВиходячи з введеного поняття мети, першочерговими пiд задачами i: вибiр способу синхронiзацii, вибiр способу вимiру початкових параметрiв синхронiзацii й способу формування команди на включення вимикача генератора. Наступними пiдзадачами при цьому будуть: формування iмпульсних послiдовностей, жорстко прив'язаних до вхiдних синусоiдальних напруг, зсув iмпульсних послiдовностей на необхiднi кути, пропорцiйнi швидкостi ковзання часу включення, визначення знака швидкостi ковзання, фiксацiя моменту збiгу зрушених по фазi iмпульсних послiдовностей, подача команди на включення вимикача генератора.
Перерахованi пiдзадачi, у свою чергу, залежно вiд iхньоi складностi розбиваються на вiдповiднi складовi. Так, зокрема, пiд задача зрушення iмпульсних послiдовностей на необхiднi кути розбиваiться на допомiжнi пiдзадачi одержання необхiдних кутiв зрушення фаз, вимiру цих кутiв i iхнього наступного переносу для забезпечення затримки iмпульсних послiдовностей.
1.4 Вибiр способу синхронiзацii, способу вимiру параметрiв синхронiзацii та спосiб подачi команди на включення вимикача генератораЗ огляду на накопичений досвiд i виходячи iз сформульованоi мети, що складаiться в забезпеченнi вимог точностi роботи синхронiзатора, при проектуваннi вибираiться спосiб точноi синхронiзацii, параметри синхронiзацii визначаються прямим способом вимiру, а команда на включення формуiться з постiйним часом випередження.
При цьому ключовою процедурою i вибiр моменту подачi команди на включення вимикача генератора. При виборi тих або iнших рiшень пiдзадач проектування й пошуку ключовоi процедури будемо виходити з наступних мiркувань. У запропонованому розгалуженому графi вершина ![]() Ваявляi собою завершення процедури якоi-небудь проектноi пiдзадачi " n", що входить до складу безлiчi всiх процедур проектування П. Весь процес проектування описуiться наступними спiввiдношеннями:
Ваявляi собою завершення процедури якоi-небудь проектноi пiдзадачi " n", що входить до складу безлiчi всiх процедур проектування П. Весь процес проектування описуiться наступними спiввiдношеннями:
 Ва(1.4)
Ва(1.4)
Уведемо в розгляд функцiю fn, за допомогою якоi вiдобразимо зв'язок множин вершин графа ti, tk з процедурами n:
 Ва(1.5)
Ва(1.5)
Введеноi функцii (1.4.2) властивi наступнi обмеження:
![]() Вапри фiксованих , i, k; (1.6)
Вапри фiксованих , i, k; (1.6)
![]() Вадля будь-якого . (1.7)
Вадля будь-якого . (1.7)
Обмеження (1.4.3) полягаi в тому, що на ту саму вершину не може надходити сигнал вiд рiзних процедур "n".
Обмеження (1.4.4) полягаi в тому, що на вхiд вершини tn i з ii виходу повинен надходити хоча б один сигнал. Уведемо функцiю приналежностi ![]() , що розумii як суб'iктивну мiру виконання процедури (ti, tk). Оскiльки безлiч П звичайно, остiльки функцiя приналежностi μ цiii безлiчi являi собою матрицю:
, що розумii як суб'iктивну мiру виконання процедури (ti, tk). Оскiльки безлiч П звичайно, остiльки функцiя приналежностi μ цiii безлiчi являi собою матрицю:
![]() Ва(1.8)
Ва(1.8)
де iндекси рядкiв вiдповiдають iндексам вхiдних вершин графа ti, а iндекси стовпцiв - вихiдним вершинам графа tk.
Викладений матерiал дозволяi сформулювати методику проектування синхронiзатора, вiдповiдно до якоi процес проектування полягаi в перетвореннi вихiдноi iнформацii, що отримуiться у вхiдних синусоiдальних напругах:
заданих обмеженнях по початкових параметрах синхронiзацii δдоп, ωsдоп, ΔUдоп i часу включення вимикача генератора tвкл, у кiнцеву iнформацiю, на пiдставi якоi приймаiться рiшення про формування команди пристроiм синхронiзацii.
пристрiй синхронiзацiя автоматична генератор
Першим етапом пропонованоi методики i етап введення вихiдних даних i визначення критерiю (мети), до якого треба прагнути. Далi послiдовно приймаються рiшення про спосiб синхронiзацii, способi вимiру кута мiж синхронiзуiмими напругами, способi вимiру кутовоi частоти ковзання й способi формування команди на включення вимикача генератора. Пiсля рiшення цих завдань складаiться структурна схема синхронiзатора й формуються часнi пiдзадачi, пов'язанi з одержанням iмпульсних послiдовностей зi зсувом по фазi синхронiзуiмих напруг, затримкою iмпульсних послiдовностей, iхнiм переносом, фiксацiiю моменту збiгу фаз, контролем частоти ковзання й вибором моменту подачi команди на включення вимикача генератора. При рiшеннi цих пiдзадач аналiзуються альтернативнi варiанти.
Набiр альтернатив являi собою набiр матриць (1.8). Просування по представленому графi здiйснюiться залежно вiд поставлених умов.
Розглянемо бiльш докладно рiшення приватних завдань проектування.
2. Вибiр способу формування команди на включення генератора способом точноi синхронiзацii
Вiдповiдно до умов точноi синхронiзацii команда на включення вимикача генератора повинна бути подана з попередженням таким чином, щоб до моменту замикання контактiв вимикача кут мiж синхронiзуiмими напругами дорiвнював би нулю. У загальному випадку кут випередження δвип, тобто кут, при досягненнi якого подаiться команда на включення вимикача генератора, визначаiться з наступного спiввiдношення:
![]() , (2.1)
, (2.1)
де tвкл - час включення, рiвний часу спрацьовування синхронiзатора й часу замикання контактiв вимикача генератора;
ωs, ξs - швидкiсть i прискорення ковзання.
2.1 Вибiр способу подачi командиНа практицi прискоренням ковзання при створеннi пристроiв синхронiзацii найчастiше зневажають i команду на включення вимикача генератора подають або з постiйним кутом випередження δвип=const, або з постiйним часом випередження tвип=const. У першому випадку кут випередження δвип вибираiться постiйним i рiвним:
![]() , (2.2)
, (2.2)
де ![]() Ва- розрахункова швидкiсть ковзання, обрана рiвно половинi припустимоi швидкостi ковзання ωsдоп. У другому випадку кут випередження δвип залежить вiд швидкостi ковзання, а його величина визначаiться зi спiввiдношення:
Ва- розрахункова швидкiсть ковзання, обрана рiвно половинi припустимоi швидкостi ковзання ωsдоп. У другому випадку кут випередження δвип залежить вiд швидкостi ковзання, а його величина визначаiться зi спiввiдношення:
![]() , (2.3)
, (2.3)
де час включення tвкл постiйний й дорiвнюi часу випередження tвип.
Основним показником, по якому ми будемо порiвнювати синхронiзатори, i величина кутовоi помилки. Саме кутова помилка i основною причиною виникнення збурювань у процесi синхронiзацii й саме через неi з'являються провали напруги й кидки струму, неприпустимi як для генераторiв, що властиво включають, так i для електроприймачiв системи електропостачання. Як критерiй при виборi пристрою синхронiзацii варто прийняти мiнiмальну величину кутовоi помилки δпом. Виходячи з обраного критерiю, перевагу варто вiддати синхронiзаторам з постiйним часом випередження, у яких можна домогтися того, щоб звести кутову помилку δпом до нуля, тодi як у бiльш простих, у схемному рiшеннi синхронiзаторiв з постiйним кутом випередження величина кутовоi помилки визначаiться рiзницею мiж дiйсною й розрахунковою швидкостями ковзання й дорiвнюi:
![]() . (2.4)
. (2.4)
Використання синхронiзаторiв з постiйним кутом випередження може бути виправдано тiльки у випадку застосування швидкодiючих вимикачiв.
Складнiсть схемноi реалiзацii пристроiв синхронiзацii з постiйним часом випередження пов'язана з необхiднiстю формування команди зi змiнним кутом випередження, величина якого залежить вiд фактичноi швидкостi ковзання.
2.2 Вибiр способу вимiру частоти ковзання
Точнiсть обробки постiйного часу випередження визначаiться точнiстю вимiру кута δ мiж синхронiзуiмими напругами й точнiстю вимiру частоти ковзання ωs.
У застосовуваннi у цей час в пристроях синхронiзацii для вимiру величини δ i ωs часто використовуiться так званий непрямий метод вимiру, заснований на використаннi огинаючоi напруги биття Us (t). Миттiве значення напруги биття us (t) дорiвнюi рiзницi миттiвих значень синхронiзуiмих напруг u1 (t) i u2 (t):
![]() . (2.5)
. (2.5)
У випадку, коли U1=U2=U, представимо (2.5) у виглядi:
![]() . (2.6)
. (2.6)
Величина огинаючоi напруги биття Us (t) визначаiться з (2.6) i дорiвнюi:
![]() . (2.7)
. (2.7)
Використовуючи (2.7), можливо визначити як частоту ковзання ωs, так i поточний кут зрушення фаз δ. Дiйсно, iнформацiю про величину ωs несе в собi час Ts мiж моментами проходження через нуль огинаючих биттiв. Визначивши перiод биттiв Ts i обчисливши величину ![]() , одержують частоту ковзання fs i далi швидкiсть ковзання ωs. Величина кута зрушення фаз визначаiться зi спiввiдношення:
, одержують частоту ковзання fs i далi швидкiсть ковзання ωs. Величина кута зрушення фаз визначаiться зi спiввiдношення:
![]() , (2.8)
, (2.8)
з якого видно, що по величинi напруги биттiв можна побiчно судити про величину кута зрушення фаз.
Однак непрямому методу вимiру параметрiв синхронiзацii ωs i δ властивi помилки, що особливо сильно проявляються тодi, коли U1≠U2, тобто тодi, коли огинання биттiв через нуль не проходить, у зв'язку iз чим важко визначити як перiод биттiв Ts, так i встановити однозначний зв'язок мiж величинами δ i Us.
Запропоновано для визначення параметрiв синхронiзацii використати прямий метод вимiру, заснований на вимiрi часу мiж моментами проходження через нуль синхронiзуiмих напруг. Викладенi основнi способи формування команди на включення вимикача генератора, заснованi на використаннi прямого методу вимiру.
3. Способи одержання постiйного часу випередження
3.1
Кiнцево-рiзнiсний спосiб
По цьому способi команду подають у момент часу, коли поточне значення кута зсуву фаз стаi рiвним розрахунковому значенню, тобто тодi, коли виконуiться наступна рiвнiсть:
 . (3.1)
. (3.1)
Перейдемо вiд диференцiального рiвняння (3.1) до кiнцево-рiзнiсного рiвняння:
 , (3.2)
, (3.2)
де ![]() Вай
Вай ![]() Ва- два послiдовнi значення кута, вимiрянi через час, рiвний перiоду меншоi частоти
Ва- два послiдовнi значення кута, вимiрянi через час, рiвний перiоду меншоi частоти ![]() .
.
Увiвши позначення  Вазапишемо (3.2) у виглядi:
Вазапишемо (3.2) у виглядi:
![]() . (3.3)
. (3.3)
З (3.3) видно, що якщо сформувати команду в момент часу, коли поточне значення кута ![]() Вастане рiвним розрахунковому, певному з рiвностi:
Вастане рiвним розрахунковому, певному з рiвностi:
 Ва(3.4)
Ва(3.4)
то тим самим буде отриманий постiйний час випередження.
3.2 Часовий спосiб одержання постiйного часу випередженняПо цьому способi порiвнюють мiж собою тривалостi ![]() Вай
Вай ![]() Вадвох послiдовних вiдрiзкiв часу мiж iмпульсами, сформованими на початку перiоду синусоiдальних напруг мережi й генератора.
Вадвох послiдовних вiдрiзкiв часу мiж iмпульсами, сформованими на початку перiоду синусоiдальних напруг мережi й генератора.
У системi вiдлiку iмпульсiв великоi частоти ![]() Вавеличини кутiв
Вавеличини кутiв ![]() Ваi
Ваi ![]() , що вiдповiдають вiдрiзкам часу
, що вiдповiдають вiдрiзкам часу ![]() Вай
Вай ![]() , рiвнi:
, рiвнi:

 . (3.5)
. (3.5)
Кутова частота ковзання ![]() дорiвнюi:
дорiвнюi:
 Ва(3.6)
Ва(3.6)
Час випередження визначаiться в такий спосiб:
 Ва(3.7)
Ва(3.7)
Для формування команди часом випередження ![]() , рiвним часу включення
, рiвним часу включення ![]() , необхiдно, щоб величина
, необхiдно, щоб величина ![]() Вавизначалася зi спiввiдношення:
Вавизначалася зi спiввiдношення:
 . (3.8)
. (3.8)
Вiдповiдно до умови для одержання постiйного часу випередження необхiдно послiдовно визначати тривалiсть вiдрiзкiв ![]() Ваi
Ваi ![]() Вай порiвнювати iх один з одним. У реверсивному лiчильнику необхiдно записати число
Вай порiвнювати iх один з одним. У реверсивному лiчильнику необхiдно записати число ![]() , пропорцiйне
, пропорцiйне ![]() , i зчитувати число
, i зчитувати число ![]() Вапротягом вiдрiзка часу
Вапротягом вiдрiзка часу ![]() Ваiз частотою проходження iмпульсiв у
Ваiз частотою проходження iмпульсiв у  Вараз бiльшоi, нiж частота запису.
Вараз бiльшоi, нiж частота запису.
Якщо пiсля закiнчення часу ![]() Вазчитування числа
Вазчитування числа ![]() Ване закiнчено, то повинна подаватися команда на включення вимикача генератора.
Ване закiнчено, то повинна подаватися команда на включення вимикача генератора.
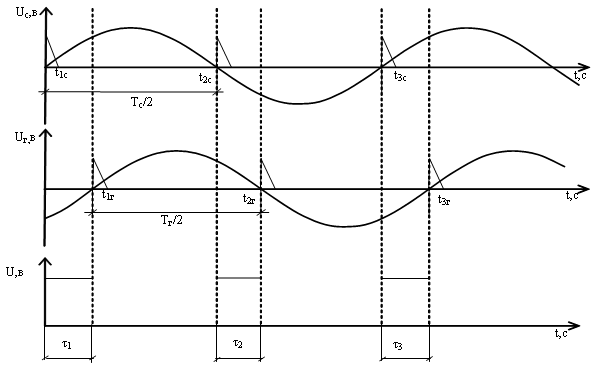
Постiйний час випередження можна одержати, формуючи в момент переходу через нуль синусоiдальних напруг керуючi, основнi й допомiжнi iмпульси (рис.3.8).
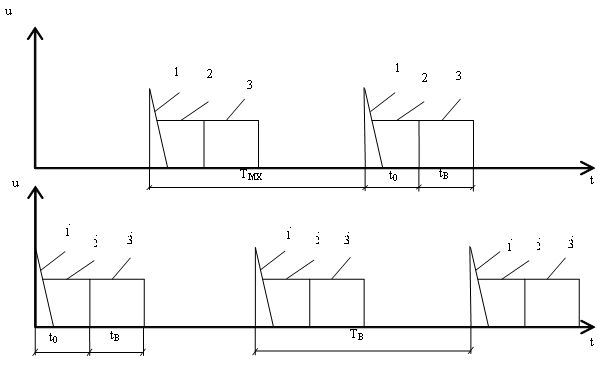 |
Рис.3.3.1 РЖмпульсний спосiб одержання постiйного часу випередження.
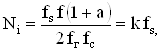
Керуючi iмпульси 1, 1́ прив'язанi по фазi до нуля синусоiди, основнi iмпульси 2, 2́ своiм переднiм фронтом прив'язанi до переднього фронту керуючих iмпульсiв, а допомiжнi iмпульси 3, 3́ своiм переднiм фронтом прив'язанi до заднього фронту основних iмпульсiв 2, 2́. Основнi й допомiжнi iмпульси мають однакову тривалiсть ![]() Пакет iмпульсiв бiльшоi частоти своiм керуючим iмпульсом 1́ насуваiться на пакет iмпульсiв меншоi частоти з боку заднього фронту допомiжного iмпульсу 3. Збiгу iмпульсiв 1́ i 3 використовуються для оцiнки рiзницi частот, а збiгу iмпульсiв 1́ i 2 - для одержання постiйного часу випередження. Оцiнка ковзання, як i в синхронiзатора з постiйним кутом випередження, виробляiться по числу збiгiв N iмпульсiв 1́ i 3. Для N справедлива рiвнiсть:
Пакет iмпульсiв бiльшоi частоти своiм керуючим iмпульсом 1́ насуваiться на пакет iмпульсiв меншоi частоти з боку заднього фронту допомiжного iмпульсу 3. Збiгу iмпульсiв 1́ i 3 використовуються для оцiнки рiзницi частот, а збiгу iмпульсiв 1́ i 2 - для одержання постiйного часу випередження. Оцiнка ковзання, як i в синхронiзатора з постiйним кутом випередження, виробляiться по числу збiгiв N iмпульсiв 1́ i 3. Для N справедлива рiвнiсть:
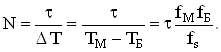 Ва(3.9)
Ва(3.9)
У процесi синхронiзацii значення ![]() й
й ![]() Вазмiнюються не бiльше нiж на 5% у порiвняннi з номiнальним значенням, у зв'язку iз чим добуток
Вазмiнюються не бiльше нiж на 5% у порiвняннi з номiнальним значенням, у зв'язку iз чим добуток ![]() Ваможна вважати величиною постiйноi й рiвноi К. У зв'язку iз цим число збiгiв
Ваможна вважати величиною постiйноi й рiвноi К. У зв'язку iз цим число збiгiв ![]() Ваi функцiя тiльки частоти ковзання:
Ваi функцiя тiльки частоти ковзання:
 Ва(3.10)
Ва(3.10)
Умова на виконання синхронiзацii ![]() Ваз врахуванням (3.11) формуiться так:
Ваз врахуванням (3.11) формуiться так:
 Ва(3.12)
Ва(3.12)
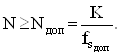
Постiйний час випередження вiдпрацьовуiться в момент чергового збiгу iмпульсiв 1́ i 2 за умови, що число попереднiх збiгiв дорiвнюi:
![]() Ва(3.13)
Ва(3.13)
Умова (3.4) означаi, що вiд моменту подачi команди до моменту збiгу iмпульсiв 1́ i 1 залишилося постiйне число збiгiв ![]() ВаЧас випередження буде дорiвнювати добутку цього залишку на тривалiсть перiоду меншоi частоти:
ВаЧас випередження буде дорiвнювати добутку цього залишку на тривалiсть перiоду меншоi частоти:
 Ва(3.14)
Ва(3.14)
У синхронiзаторi при збiгу iмпульсiв 1́ i 3 визначають число збiгiв ![]() , а потiм визначають залишок збiгiв
, а потiм визначають залишок збiгiв ![]() Ваiмпульсiв 1́ i 3 i записують цей залишок у лiчильник. Зчитування числа, записаного в лiчильник, починаiться з моменту збiгiв iмпульсiв 1́ i 2.
Ваiмпульсiв 1́ i 3 i записують цей залишок у лiчильник. Зчитування числа, записаного в лiчильник, починаiться з моменту збiгiв iмпульсiв 1́ i 2.
Постiйний час випередження спрацьовуi в момент завершення зчитування залишку ![]() Вав лiчильнику.
Вав лiчильнику.
По цьому способi зрiвнюються поточнi значення рiзницi фаз, представленi в дискретнiй формi й обмiрюванi протягом кожного перiоду синхронiзуiмих напруг, зi збiльшенням цiii рiзницi.
Для визначення величини кута формуються iмпульси, що запускають у момент переходу через нуль напруги меншоi частоти й що скидають у момент переходу через нуль напруги бiльшоi частоти.
Тривалостi iмпульсiв ![]() Вавiдповiдно до рис.3.4.1 рiвнi:
Вавiдповiдно до рис.3.4.1 рiвнi:
![]()
![]()
![]() Ва(3.15)
Ва(3.15)
Мiж моментами ![]() Вай
Вай ![]() Ваiснуi очевидний зв'язок
Ваiснуi очевидний зв'язок
![]()
![]() Ва(3.16)
Ва(3.16)
Вiдрiзки ![]() Вай
Вай ![]() Ваеквiвалентнi величинам поточних кутiв зрушення фаз, а рiзниця мiж
Ваеквiвалентнi величинам поточних кутiв зрушення фаз, а рiзниця мiж ![]() Ваi
Ваi ![]() Вапропорцiйна частотi ковзання
Вапропорцiйна частотi ковзання ![]() :
:
 |
 . (3.17)
. (3.17)Рис.3.4.1 Дискретний спосiб формування постiйного часу випередження
Постiйний час випередження спрацьовуi, коли рiвнi числа у двох лiчильниках, один iз яких заповнюiться iз частотою ![]() , а iнший - через половину перiоду меншоi частоти iз частотою
, а iнший - через половину перiоду меншоi частоти iз частотою ![]() .
.
Порiвнюючи число ![]() Ваiз числом
Ваiз числом ![]() Ваодержуiмо в момент iхньоi рiвностi:
Ваодержуiмо в момент iхньоi рiвностi:
 . (3.18)
. (3.18)
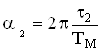
Зiставляючи (3.4.3) i (3.4.4) знайдемо:
 Ва(3.19)
Ва(3.19)
де  Ва- практично постiйний коефiцiiнт, величина якого може бути обрана рiвнiй часу випередження.
Ва- практично постiйний коефiцiiнт, величина якого може бути обрана рiвнiй часу випередження.
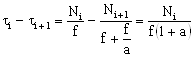
Загальним для кiнцево-рiзницевого, часового, iмпульсного й дискретного способiв одержання постiйного часу випередження i необхiднiсть вимiру й порiвняння один з одним наступних один за одним iнтервалiв часу (тривалостi вiдрiзкiв) через що можливий пропуск команди на включення вимикача. Це пов'язане з тим, що можливе таке чергування iнтервалiв часу, коли команду потрiбно подавати не при порiвняннi першого iз другим, третього iз четвертим, п'ятого iз шостим i т.д., а при порiвняннi другого iз третiм, четвертого з п'ятим, шостого iз сьомим i т.д. Пропуск команди на включення вимикача генератора приводить до затягування процесу синхронiзацii, що особливо неприiмно при малих кутових частотах ковзання.
3.5 Спосiб затримки i зсуву по фазi синхронiзуiмих напругВiдзначених недолiкiв можна уникнути, якщо використати для формування команди на включення вимикача генератора спосiб, заснований на затримцi й зсуву по фазi синхронiзуiмих напруг.
За цим способом необхiдно затримати iмпульси з меншою частотою проходження на два значення часу, одне iз яких бiльше iншого у два рази. У момент збiгу затриманих iмпульсiв з iмпульсами бiльшоi частоти необхiдно сформувати новi iмпульснi послiдовностi, перша з яких затримуiться на час спрацьовування вимикача генератора, а друга - на час, обумовлений обмiрюваним часом мiж затриманими першими й другими, сформованими iмпульсами меншоi частоти. Затримкою iмпульсiв на два значення часу досягаiться iхнi зрушення по фазi убiк вiдставання на кути ![]() Вай
Вай ![]() , рiвнi
, рiвнi
 ,
,  . (3.20)
. (3.20)
Затримка iмпульсу, одержуваного в момент збiгу iмпульсних послiдовностей напруги бiльшоi частоти й напруги меншоi частоти, зрушеного по фазi на кут ![]() , еквiвалентна зрушенню по фазi на кут
, еквiвалентна зрушенню по фазi на кут ![]() , рiвний
, рiвний ![]() .
.
У синхронiзаторi виробляiться вимiр вiдрiзка часу мiж моментом формування iмпульсу, затриманого на час ![]() , i моментом збiгу iмпульсiв бiльшоi частоти
, i моментом збiгу iмпульсiв бiльшоi частоти ![]() Вазi зрушеними на кут
Вазi зрушеними на кут ![]() Ваiмпульсами меншоi частоти. Цьому вiдрiзку часу еквiвалентний кут
Ваiмпульсами меншоi частоти. Цьому вiдрiзку часу еквiвалентний кут ![]() , рiвний:
, рiвний:
![]() . (3.21)
. (3.21)
Команда на включення подаiться пiсля моменту збiгу iмпульсiв бiльшоi частоти й зрушених на кут ![]() Ваiмпульсiв меншоi частоти через вiдрiзок часу, необхiдний для вiдпрацьовування кута
Ваiмпульсiв меншоi частоти через вiдрiзок часу, необхiдний для вiдпрацьовування кута ![]() . Величина кута зрушення фаз
. Величина кута зрушення фаз ![]() Вадо моменту подачi команди дорiвнюi:
Вадо моменту подачi команди дорiвнюi:
![]() . (3.22)
. (3.22)
З умови роботи синхронiзатора ясно, що ![]() , тобто
, тобто
 Ваи.
Ваи.  Ва(3.23)
Ва(3.23)
Вираз (3.23) визначаi правило вибору тимчасовоi затримки знизу. У зв'язку з тим, що величина кута ![]() Ваповинна бути менше 180В°, величина
Ваповинна бути менше 180В°, величина ![]() Ваповинна бути менше
Ваповинна бути менше ![]() , тобто
, тобто ![]() .
.
Ця нерiвнiсть визначаi правило вибору тимчасовоi затримки зверху. Границя зверху обмежуi можливий дiапазон кутiв включення, а значить i можливих значень ![]() Ваi
Ваi ![]() Вавеличинами, обумовленими з наступноi нерiвностi:
Вавеличинами, обумовленими з наступноi нерiвностi:
![]() . (3.24)
. (3.24)
Основний недолiк цього способу полягаi в складностi його схемноi реалiзацii.
Бiльш простим у реалiзацii i спосiб, по якому команду на включення вимикача генератора варто подати в момент збiгу напруги бiльшоi частоти зi зрушеним по фазi убiк вiдставання напругою меншоi частоти.
Пiдвищити точнiсть вiдпрацьовування постiйного часу випередження можливо, зсовуючи кожну iз синхронiзуiмих напруг убiк вiдставання на кут, пропорцiйний ковзанню даноi напруги стосовно фiксованоi частоти, загальноi для обох напруг i свiдомо бiльшоi частоти кожного з них.
Кут зрушення фази напруги меншоi частоти ![]() Ва(рис.3.5.1) дорiвнюi
Ва(рис.3.5.1) дорiвнюi ![]() , а кут зрушення фази напруги бiльшоi частоти
, а кут зрушення фази напруги бiльшоi частоти ![]() Вадорiвнюi
Вадорiвнюi ![]() , де
, де ![]() Ва- задана фiксована кутова частота ковзання; K - коефiцiiнт пропорцiйностi.
Ва- задана фiксована кутова частота ковзання; K - коефiцiiнт пропорцiйностi.
Команда на включення вимикача генератора подаiться в момент збiгу по фазi напруг ![]() Ваi
Ваi ![]() , коли кут мiж напругами
, коли кут мiж напругами ![]() Вай
Вай ![]() Вабуде дорiвнюi:
Вабуде дорiвнюi:
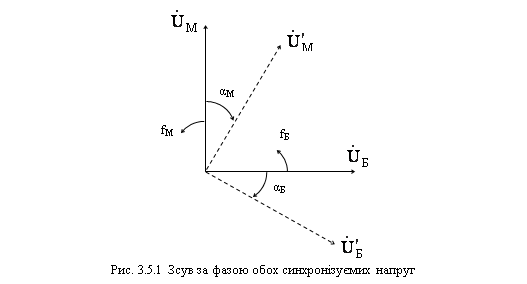
![]() . (3.25)
. (3.25)
Час вiдпрацьовування цього кута постiйний й дорiвнюi часу випередження:
 Ва(3.26)
Ва(3.26)
Результати проведеного аналiзу дають пiдстави зробити висновок про те, що найбiльш кращим варто вважати спосiб формування команди на включення вимикача генератора, заснований на зсуву по фазi убiк вiдставання обох синхронiзуiмих напруг.
4. Вибiр структурноi схеми синхронiзатора
Практична реалiзацiя розглянутого способу одержання постiйного часу випередження можлива у випадку використання в якостi фазозсовуючих пристроiв динамiчних ланок першого порядку загального типу, диференцiальнi рiвняння яких мають такий вигляд:
![]() , (4.1)
, (4.1)
де ![]() Ва- постiйнi часу;
Ва- постiйнi часу;
![]() Ва- коефiцiiнт пiдсилення;
Ва- коефiцiiнт пiдсилення;
![]() Ва- оператор диференцiювання;
Ва- оператор диференцiювання;
![]() Ва- вихiдна й вхiдна координати.
Ва- вихiдна й вхiдна координати.
Фазова характеристика ![]() Ватакоi ланки описуiться наступним рiвнянням:
Ватакоi ланки описуiться наступним рiвнянням:
![]() , (4.2)
, (4.2)
Фазова характеристика, апроксимована вiдрiзками прямих лiнiй при змiнi кутових частот, що лежать у дiапазонi ![]() , представлена на рис.4.1
, представлена на рис.4.1
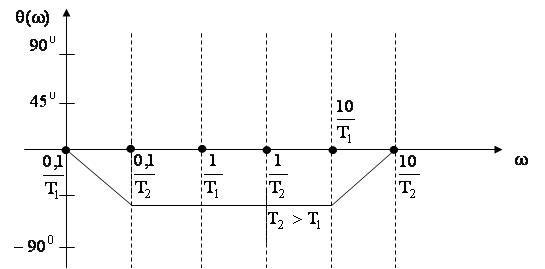
Рис.4.1 Фазова характеристика.
З рис.4.1 легко бачити, що ланка першого порядку загального типу при вiдповiдному пiдборi постiйних часу ![]() Вай
Вай ![]() Вадозволяi забезпечити зрушення убiк вiдставання синхронiзуiмих напруг у випадку, якщо
Вадозволяi забезпечити зрушення убiк вiдставання синхронiзуiмих напруг у випадку, якщо  .
.
Головнi труднощi при реалiзацii розглянутого способу одержання постiйного часу випередження полягаi в забезпеченнi одержання лiнiйностi залежностi у всьому дiапазонi припустимих при синхронiзацii кутових частот ![]() i
i ![]() Ваабо, що те ж, лiнiйностi залежностi фазовоi характеристики.
Ваабо, що те ж, лiнiйностi залежностi фазовоi характеристики.
З iснуючих фазозсовуючих пристроiв бiльшою мiрою задовольняють цiй вимозi пристроi, що забезпечують фазове автопiдстроювання частоти. При цьому потрiбно, однак, мати на увазi, що властиво iмпульсна фазова систем
Вместе с этим смотрят:
Анализ режимов автоматического управления
Архитектуры реализации корпоративных информационных систем
Базы данных и их сравнительные характеристики
Выращивание плёнки GeSi и CaF2 на кремниевых подложках