Е=tPдG
Для нормальных изм Рд=0,9
Для радиоэл-х Рд=0,95
Определение доверительного интервала случайных погрешностей.
Для нормального з-на
=F(E)-F(-E) t=E/G
Рд=Ф(E/G)-Ф(-E/G)=Ф(t)-Ф(-t)=2Ф(t)
tн=Ф-1(Рд/2) ->tн(Рд)
Рд=0,9, tн=1,643
Рд=0,95, tн=1,96
Рд=0,975, tн=2,247
Eрд = tн(Рд)*S
X тАУ распределение ср.ариф-го, рассчитанного по конечной выборке из нормально распределений генеральной совокупности наз. Распределение Стьюдента.
ts(Рд,n)
Ex=ts*Sx= ts(Рд,n)S/^n
При n больших, tn=ts.
При малых n tn и ts сильно различаются, если n>=30-40 tn=ts.
8. Погрешности СИ, их нормирование. Классы точности СИ.
ΔХси=Хси-Хдст
ΔХмеры=Хм.ном-Хм.дст
(Хм.ном-номинальное знаечние меры;
Хм.дст-дейст.знаечние ФВ, воспроиз.мерой)
Нормирование погрешности рабочих СИ производится по пределу суммы сист. и случ. Погрешности.
Классы точности тАУ одна един.цифра в % хар-ет погрешность прибора.
9. Определение результата и погрешности косвенных измерений.
Y=F(x1,x2.xn)
Δyсист=
Δi=Δiсист+Δiсл
10. Обработка результатов прямых равноточных измерений. Идентификация закона распределения случайных чисел. Критерий Пирсона.
11.Правила суммирования погрешностей.(НСП и случайные погрешности)
1) суммирование систематических погрешностей.
M[x+y+z]=M[x]+M[y]+M[z]
 ,
,
Где k(0,9)=0,95, k(0,95)=1.1, k(0,99)=1,4
 -по равновероятному з-ну СКП
-по равновероятному з-ну СКП
2)Случайные погрешности
Для зависимых
rij=+1 , S=S1+S2
rij=-1, S=S1-S2
Для независимых:
rij=0, 
Ei -> tiSi ->Si=Ei/ti, а потом суммирование по общим правилам.
EΣ=tΣ-SΣ, если Рд=0,9 tΣ=1,6; Рд=0,95, tΣ =1,8
3)Сумма случайных и систематических погрешностей
Если отношение  , то определяется
, то определяется 
а 
(НСП принебригают)
 :
: 
(случ.погр. принебригают)
Если ,
,  , где
, где
 ,
, 
12.Сигналы измерительной информации.
Сигнал функционально связывающий с измеряемой ФВ, наз.сигналом измерительной информации.
1. Непрерывный по информативному параметру и по времени.
-амплитудная модуляция АМ
-частотная ЧМ
-фазовая ФМ
2. Непрерывная по инф-му пар-ру и дискретна во времени.
АИМ, ЧИМ, ШИМ

3.Непрывные по времени, квантованные по инф.парам.
4.Квантованные по инф.парам и дискретные по времени
Кодоимпульсные сигналы.
Представление сигналов.
1. Временное представление
U(t)=Um*Sinωt
y(t)= 
2. Спектральные пр-е
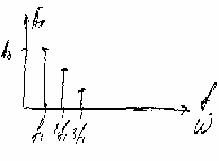
y(t)=A0+ - ряд Фурье для периодических сигналов
- ряд Фурье для периодических сигналов
Амплитудный спектр:
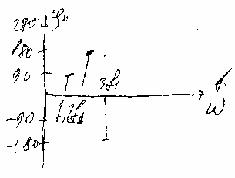
Фазовый спектр:
13.Электромеханические приборы тАУ магнитоэлектрической системы, электромагнитной, электромеханической систем, электростатической системы. Принцип действия, уравнения шкалы, области применения, условные обозначения на шкале.
Аналоговыми наз. Приборы, показания которых являются непрерывной ф-ей измерений величины.
э/мех приборы состоят:
-измерительная цепь
-измерит.мех-зм
-отсчетное устр-во
-вспомогательное устр-во(успокоитель,корректор, арретир)
Изм.мех-м преобразует энергию э/маг поля в поворот вращающийся части прибора.
Мвр=dWэм/dα тАУ вращающийся момент
Мпр=W*α тАУ противодействующий момент.
Логометр тАУ прибор, в котором противодействующий момент созд.электр.полем.
Вспомогательное уст-во: Успокойтель гасит колебания стрелки. Арретир тАУ только в гальванометрах, не позволяет им выходить из строя.
1. магнитоэлектрическая система
Вращающийся момент возникает в результате взаимодействия магн.поля простого магнита и магнитного поля катушки с током.
Достоинства:
-высокая чувствительность до нА
-высокая точность
-малое собственное потребление жнергии
-слабое влияния внеш.полей
-низкая температурная погрешность
-линейная и стаб-я хар-ка преобрпзования.
Недостатки:
-малая перегрузочная способность по току.
-сложность, дороговизна.
Применение:
Основной прибор(индикатор) в электронных СИ.
Гальвонометры, Логометры
2.Электромагнитная система.
Вращающийся момент за счет взаимодействия одного или нескольких ферромагнитных сердечников подвижной части и магнитного поля неподвижной катушки.
Достоинства:
-простота констукции
-способность выдерживать высокие нагрузки и перегрузки
-измер и пост.и переем.ток
-дешевизна
-надежность
Недостатки:
-низкая чувствительность
-малая точность
-сильное влияния внеш.полей
Применение: основная часть счетовых приборов. Для измерения токов, напряж-й, частот, фаз и тп.
3. Электромеханическая система
Вращ.момент за счет взаимодействия магнитных полей неподвижной и подвижной катушки.
Достоинства:
-достаточно точны
-изм. Постоянный и переменные токи до 10кГц
-высокая стабильность св-в
Недостатки:
-низкая чувствительность
-влияния внешних полей
-сложность в изучение
-мала перегрузная способоность
Применение: Для изм-я пост/перем токов и напр-й, мощ-ти, разности фаз и тд.
4.Электростатические
Вращающий момент за счет взаимод-я 2-х систем зар-х проводников, один из кот-х неподвижный, а другой подвиж.
Силы взаимодействия э/с полей в порядки раз меньше, чем у э/м полей.
Достоинства:
-малое собственное потреб-е
-слабая чувст-ть к частоте и форме напр-я
-возм-ть измерения выс-х напр-й до 100 кВ
Недостатки:
-малая чувствительность
-сильное влияние внеш.полей
Применение: для изм-й напр-й в диапозоне частот до 100 кГц и до 100 кВ.
14.Электромеханические приборы с преобразователями тАУ выпрямительные и термоэлектрические. Принцип действия, дост и недост, применение.
а)выпрямительные приборы, выполнены чаще всего на полупроводниковых диодах, исп. Однополупериодные и двух-полупериодные.
Достоинства:
-работает с любыми пер-ми токами и напр-ми.
-диапазон частот до ГГц
Недостатки: Маленький
б) термоэлектрический
Достоинства: высокая точность в изм-м диапозоне частот при любой форме сигнала.
Недостатки:
-малая перегру-я спос-ть
-зависимость показ.от температуры окр.ср.
-ограниченный срок службы.
15. Классификация цифровых измерительных устр-в. Основные хар-ки цифр.уст-в.
Цифр.изм.прибором наз.прибор автоматически вырабатываемый дискретные сигналы измерит. инф-ии, показания кот-го представлены в цифровой форме.
Процесс, включающий в себя дискретизацию, квантование и кодирование вх-й величины наз.аналого-цифровым преобразованием.
16. Вольтметры постоянного напряжения. Компенсаторы.
17. Вольтметры переменного напряжения. Классификация. Обобщенные структурные схемы. Виды детекторов.
1) прямого преобразования
U(t)àПà УПТà ИМ
U(t)à Упà Пà ИМ
Напряжение измеряется путем преобразования его в постоянное напряжение.
Преобразователи переменного тока в постоянный существует 3 вида детектора:
Um(амплитудный), Uср.в(средневыпрямленное значение), Uд(среднеквадратичное значение)
2)уравновешенные преобразования
ВУ содержит делитель, ПОС- преобразователь цепи обратной связи
18. Влияния формы кривой напряжения на показания вольтметра переменного тока.
U(t)àД àШкала
Uш*0,707 = Ап1
Uср.в.*1,1=Ап2
U*1=Ап3
Um=max(U(t))
C1*Ums=Us
C2*Uср.вs=Us
C3*Us=Us
C1,C2,C3- градуирующий коэффициент
С1=Us/Ums=1/Kas=1/^2=0,707
C2=Us/Uср.вs=Kфs=1,11
U(t)àЭл.цепьàV
19. Цифровые вольтметры с время импульсным преобразованием.
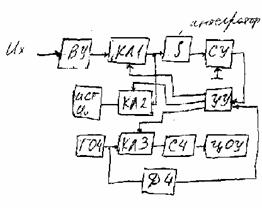
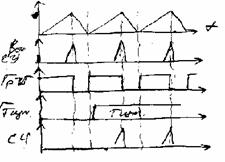
В основу работы цифровых вольтметров постоянного тока с время-импульсным преобразованием положен время-импульсный метод преобразования постоянного напряжения в пропорциональный интервал времени с последующим измерением длительности интервала цифровым способом. Структурная схема вольтметра
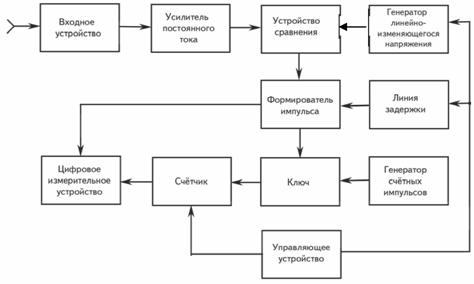
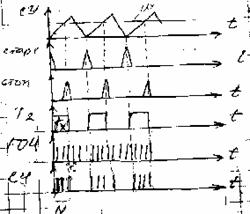
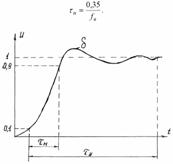
Измеряемое напряжение подаётся на входное устройство, в котором напряжение приводится к некоторому номинальному пределу с помощью делителя напряжения и далее поступает на усилитель постоянного тока. В усилителе оно усиливается до величины, не превышающей максимального уровня сигнала генератора линейно-изменяющегося напряжения (ГЛИН), чтобы обеспечить сравнение этих напряжений. Запуск схемы осуществляется управляющим устройством, импульсы которого одновременно производят сброс счетчика перед каждым измерением и срабатывание формирователя измерительных импульсов. Работа цифровой части вольтметра поясняется временными диаграммами:

Импульсы управляющего устройства (а) запускают ГЛИН, вырабатывающий симметричное линейно-изменяющееся напряжение (6). Это напряжение, являющееся образцовым, поступает на устройство сравнения (компаратор) двух напряжений, где производится сравнение измеряемого напряжения с выхода усилителя постоянного тока и напряжения ГЛИН. В момент равенства двух напряжений устройство сравнения вырабатывает импульс (г), которым производится срабатывание формирователя импульсов, роль которого выполняет триггер с раздельным запуском. Другое срабатывание триггера осуществляется импульсом управляющего устройства, проходящего через линию задержки, осуществляющую задержку импульса на величину, равную половине прямого хода сигнала ГЛИН (в). Таким образом длительность импульса формирователя (д) будет пропорциональна измеряемому напряжению Δt = kUx, где к - коэффициент пропорциональности, характеризующий угол наклона пилообразного напряжения. Импульс формирователя поступает на ключ, пропускающий за это время сигналы генератора счетных импульсов на вход счетчика. Цифровое измерительное устройство отображает на цифровом табло количество счетных импульсов N = Δtf0 (е). Полярность измеряемого постоянного напряжения определяется очерёдностью срабатывания формирователя импульсов и соответствующий сигнал Вл-В» или Вл+В» подаётся в цифровое измерительное устройство.
Погрешности: зависит от линейности и отклонения скорости изменения пилообразного напряжения от номинальной, стабильности частоты генератора счетных импульсов, чувствительности сравнивающего устройства, точности установки импульса нулевого уровня и др.
Недостатки: влияние различных помех на результат измерения.
По лекциям:
UxàTxàN
а) с помощью линейно-измен. Напряжения
б) интегрирования
а)
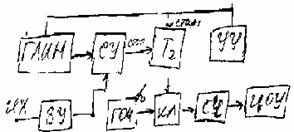
tx=Ux/Vмин
N=tx/T0=fotx=f0/Vмин*Ux
Причины возникновения погрешности:
-нестабильность ЛИН
-Настабильность частоты ГОЧ
-погрешность дискретности (Δ+-t0; δ=1/N)
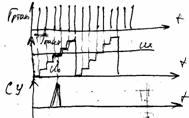
20. ЦВ, исп. Метод двойного интегрирования.
Uàtx
T1*Ux=U0*T2
Ux=T2/T1*U0=N2*T0/N1*T0=U0/N1*N2
Uвып=∫Uxdt=Uxt
Прибор помехоустойчив
Причины возникновения погрешностей:
-интегратор не идеален.
-СУ имеет порог чувствительности
21. Цифровые интегрирующие вольтметры(с частотно-импульсными преобразованиями)
UxàfxàN
Fx=k*Ux
N=Tизм/Tx=Тизм*Fx=Tизм*K*Ux
Причины погрешности:
-неидеальность интегратора
-порог чувствительности СУ
-нестабильность U0
-нестабильность Тизм
-стандартная погрешность дискретности
Общие погрешности дост-т порядка 10-4 тАУ 10-5
22. ЦВ уравновешивающего преобр-я

Погрешности: погрешности ЦАП и порог чувствительности СУ.
23. Структура и принцип действия универсального электронного осциллографа. Основные характеристики.
Универсальные С1-тАж
Для исследования периодических сигналов в полосе частот до 500 мГц. Амплитуда от мВ до 100В. Длительность сигнала от мс до с. Осциллограф в реальн. масштабе времени.
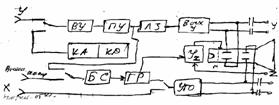
Y тАУ канал вертикального отклонения:
1)ВУ обеспечивает высокое входное напряжение, коммутирующий емк-ть, открытый и закрытый вход, тут же стоит делитель.
2)ПУ- предварительный уселитель.
3)ЛЗ тАУ линия задержки(не во всех приб.=0,1 мкс) для возможности просмотра переднего фронта импульса.
4)Вых У тАУ выходной усилитель для усиления сигнала до полн.отклонения луча экрана.
Х тАУ канал горизонтального отклонения:
ГР тАУ генератор развертки. Для формирования пилообразного напряжения развертки, обеспеч. Линейного перемещения луча.
Тр=nTс, n=1,2,3
Tp=tпр+tобр
Изменяет масштаб изображения по горизонтали.
Требование:
-высокая линейность напряжения
-большой диапазон частоты
БС- блок синхронизации и запуска. Для получения устойчивого изображения сигнала.
УГО тАУ усилитель горизонтального отклонения, увеличивает сигнал развертки, чтобы луч мог двигаться полностью по экрану.
Канал Z предназначен для установки яркости изображения.
КА и КД тАУкалибраторы амплитуды(длительности). Для повешения точности измерения путем поминального значения коэффициента развертки.
Режим работы осциллографа:
1. Автоколебательный тАУ режим непрерывной развертки. Для анализа периодических сигналов с небольшой скважностью.
2. Ждущий. Для исследования импульсов с большой скважностью.
3. Однократный(не во всех)
4. Растягивание во времени путем измен.коэф-та УГО.
5. Быстрой/медленной развертки(не во всех)
Виды развертки: Линейная развертка, круговая, спиральная.
Основные хар-ки:
1.АЧХ
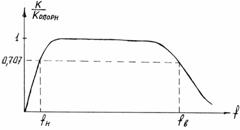
2.Переходная тАУ отклик на экране осциллографа на скачок напряжения на входе У
3. Коэффициент отклонения
Kо=1/Sч, Sч=Кус*Sэлт
Ко=U/ly [В/дел]-масштаб по У
4.Коэффициент развертки
Кр=tпр/lx [c/дел]
V=lx/tпр тАУ скорость движения луча.
5. Zвх
НЧ Rвх>=1 МОм; Свх=30-50 пФ
ВЧ Rвх>=0,5 МОм; Свх = 3-5 пФ.
24. Осциллографические методы измерения параметров сигналов. Погрешности измерений.
1) U=Kотк[V/дел]*ly[дел]*Mo; Мо=1;10
2) t=Кр[c/дел]*lx[дел]*Мр
Погрешности
Систематические:
1)

Uизм*b=Uдейст
2) 
3) случайная визуальная погрешность
Δобщ = 0,4*q/l
q тАУ ширина луча(из пасп. данных)
25. Цифровые осциллографы
26. Времяимпульсный измеритель временных интервалов. Принцип действия, структура, погрешности.
tàN
структурная схема:
 где
где

Эпюр напряжения:

Погрешности:
-относительная нестабильность ГОЧ
-погрешность дискретности. Определяется значением периода счетных импульсов То.
-погрешность δф преобразования(нестабильность порога срабатывания формирователей)
27. Нониусный измеритель временных интервалов.
Данный метод позволяет уменьшить обе составляющие погрешности тАУ в начале измеряемого интервала и в конце.
Реализация метода:
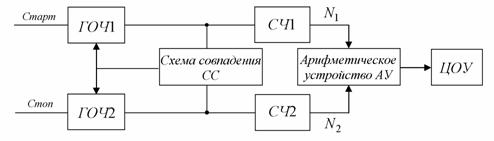
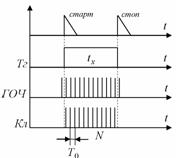
Импульс ВлстартВ» запускает генератор ГОЧ1. Импульсы с периодом Т1 поступают на счетчик i1, где подсчитываются. Импульс ВлстопВ» запускает ГОЧ2 с периодом повторения нониусных импульсов Т2 = Т1 - ΔT = Т1 -Т1/р, обычно р = 10,100. Число этих импульсов подсчитывает i2. Импульсы с ГОЧ1 и ГОЧ2 поступают на входы схемы совпадения СС, на выходе которой при совпадении счетных и нониусных импульсов возникает импульс ВлостановВ», срывающий работу обоих генераторов. При этом количество импульсов N1 и N2 фиксируется счетчиками. Арифметическое устр-во АУ рассчитывает величину временного интервала
tx = (N1 -1)Т1 - (N2-1)Т2 =T1(N1-N2) + Т1/р(N2-1)
где величину ΔT =T1/p, определяющую шаг дискретизации, называют шагом нониуса.
Видно, что дискрет измерения tx уменьшается в р раз. Но выбирать большие значения р нецелесообразно, так как начинают преобладать другие виды погрешностей (нестабильность управляемых ГОЧ, погрешности определения момента совпадения импульсов и т. д.).
28. Электронные аналоговые частотомеры(в том числе резонансные)
1)Аналоговые электронные частотомеры применяются для измерений в более широком диапазоне частот (от 10 Гц до нескольких МГц). В основном используют преобразование частоты в напряжение, которое затем измеряется магнитоэлектрическим прибором.
Схема:
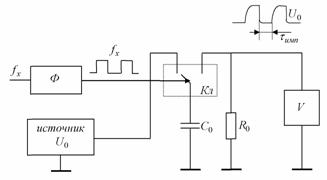
Формирователь Ф из входного сигнала формирует последовательность импульсов частотой fx, управляющем переключателем Кл. Работа основана на заряди емкости Со от источника образцового напряжения Uо с последующим разрядом через сопротивления Ro. На Ro формируются импульсы с постоянной площадью, среднее значение которых
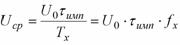
Измеряется вольтметром V. Погрешность определяется в основном стабильностью Ro, Co, Uo и вольтметром. Классы точности 0,5-2,5.
2)Резонансные частотомеры
Работа прибора основана на явление резонанса в колебательном контуре.

Справедливо при резонансе, а значит fx=fp.
Метод в основном используется в диапазоне высоких и сверхвысоких частот (от МГц до десятков ГГц). Погрешность определяется добротностью контура, чувствительностью индикатора, точностью градуировки шкалы, температурой и влажностью окружающей среды. Классы точности частотомеров 0,05-0,5.
29. Цифровые частотомеры
В настоящее время нашли наиболее широкое распространение. Основаны на том, что для измерения частоты fx периодического сигнала достаточно сосчитать число его
периодов за известный интервал времени То . Результат измерения определяется соотношением
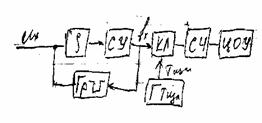
Схема:
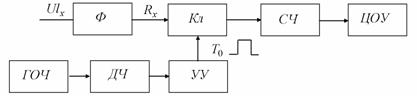
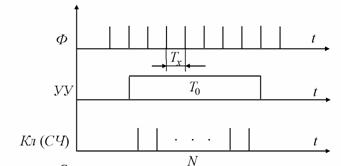
Формирователь Ф из Uвх формирует импульсы с частотой fx. Устройство управления УУ формирует из стабильных колебаний генератора образцовой частоты ГОЧ с помощью делителя частоты ДЧ строб-импульс длительностью То, открывающий ключ Кл. За время То на счетчик Сч проходит N импульсов с периодом Тх. Обычно берут T = 10-к с (К = 0, 1, 2 . . .), тогда fx= N*10-k Гц. Значение множителя 10-k учитывается положением запятой или включением соответствующей надписи (Гц, кГц, МГц и т. д.) на цифровом отсчетном устройстве ЦОУ.
Погрешности:
-нестабильность ГОЧ
-погрешности дискретности
30. Цифровые фазометры с времяимпульсным преобразованием
Этот метод нашел широкое распространение, т. к. позволяет несколько уменьшить погрешность измерения по сравнению с рассмотренными ранее вилами фазовых измерения. При этом различают:
а) Фазометры с измерением за один период (фазометры мгновенных значений фазового сдвига).
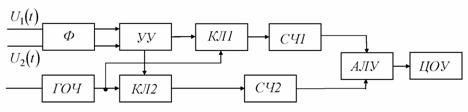
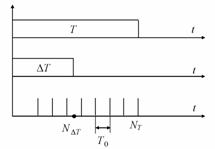
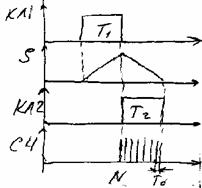
Формирователь Ф и устройство управления УУ из входных сигналов создают последовательность импульсов с длительностью ΔТ. Ключ КЛ1 открывается на время Т, а КЛ2 на время ΔТ. Пропуская на счетчики i1 и i2 импульсы с частотой fo с генератора образцовой частоты ГОЧ. Счетчик i1 осуществляет подсчет числа счетных NT, соответ периоду Т, а счетчик i2- числа счетных импульсов NΔT, соответ. периоду ΔT. В АЛУ осуществляется вычисление величины фазового сдвига 
которое отображается в цифровом отсчетном устр-ве ЦОУ.
Погрешность:
-нестабильность ГОЧ
-дискретность кодирования интервала
б) Фазометры с постоянным временем измерения (фазометры с усреднением ).
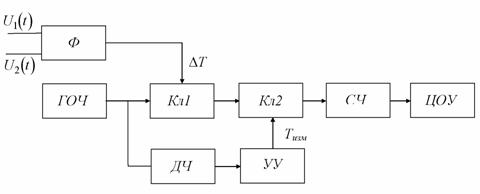
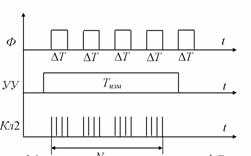
Формирователь Ф формирует импульсы длительностью ΔТ, пропорциональной измеряемому фазовому сдвигу. Ключ КЛ1 открывается на время ΔТ и пропускает N счетных импульсов частотой fо с генератора образцовой частоты ГОЧ. Ключ КЛ2 открыт на длительное время измерения Тизм , формируемое устройством управления УУ с помощью делителя частоты ДЧ из импульсов высокостабильного ГОЧ. При этом время Тизм для постоянной частоты входного сигнала обычно выбирается кратным периоду входных сигналов, т. е. Тизм = m-Т . Тогда счетчик за время Тизм подсчитает число импульсов:

n- коэффициент деления делителя частоты.
Недостаток: большое время измерения , зависящее от частоты исследуемого сигнала и необходимой точности измерений.
31.Фазометры с промежуточным преобразованием сдвига фаз в напряжение.
Структурная схема и эпюр:
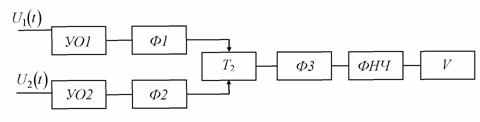
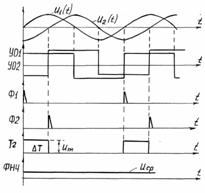
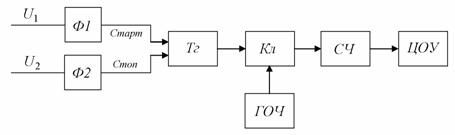
Усилители - ограничители превращают входные синусоидальные сигналы в прямоугольные (меандры). Формирователи Ф1 и Ф2 получают последовательности коротких
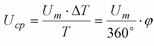
импульсов, совпадающих во времени с моментами перехода входных напряжении через нуль с одинаковой, например, положительной производной. На выходе триггера создаются импульсы длительностью ΔT, характеризующей величину измеряемого фазового сдвига. Формирователь Ф3 стабилизирует размах Uм этого импульсного напряжения. Фильтр нижних частот ФНЧ выделяет среднее значение напряжения, которое измеряется вольтметром. При этом может быть использован как аналоговый, так и цифровой вольтметр. Постоянная составляющая импульсной последовательности:
Погрешность:
-преобразование φ в интервал времени ΔТ, а затем в постоянное напряжение.
-нестабильность Um
-погрешность вольтметра
32.Фазометры уравновешивающего преобразования(компенсационные)
Метод основан на сравнении измеряемой разности фаз с образцовой, воспроизводимой фазовращателем.
Сигналы U1(t) и U2(t) поступают на установочный φу и измерительный φобр фазовращатель, а затем подводятся к индикатору ИНД разности фаз.

Индикатор позволяет фиксировать точно некоторое значение разности фаз (например, φ= О или φ= 90В°). Измерительный фазовращатель может быть проградуирован в значениях φ.
При измерениях сначала калибруют фазометр с целью устранения собственных фазовых сдвигов обоих каналов прибора, для чего подают на оба входа одно и то же напряжение. Измерительный фазовращатель при этом устанавливается на ноль, а установочным
устанавливают индикатор в требуемое состояние (либо φ = 0 , либо φ = 90В°). После этого производят непосредственно измерение. Подают на фазометр оба сигнала и, регулируя измерительный фазовращатель, добиваются отсчетного состояния индикатора. Данный процесс может осуществляться как вручную, так и автоматически с помощью устройства управления УУ. Результат измерения считывается с измерительного фазовращателя.
Погрешность:
-не точность градуировки образцового фазовращателя и разрешающей способности индикатора.
33.Мостовые методы измерения параметров цепей. Виды мостов. Их особенности. Области применения.
1. Мост

z тАУ комплексное сопротивление.
Различают уравновешенные (где V=0 в изм. диагонали) и неуравновешанные.
Условия баланса моста: z1*z4=z2*z3
Хар-ка моста:
1) Чувствительность S=Δy/Δx
Sm=Δα/(Δz/z) тАУ относительная
Вместе с этим смотрят:
"Инкарнация" кватернионов
*-Алгебры и их применение
10 способов решения квадратных уравнений
РЖнварiантнi пiдпростори. Власнi вектори i власнi значення лiнiйного оператора
РЖнженерна графiка