Принцип построения РЛС управления воздушным движением
Радиолокационные станции системы управления воздушным движением (УВД) являются основным средством сбора информации о воздушной обстановке для диспетчерского состава службы движения и средством контроля за ходом выполнения плана полетов, а также служат для выдачи дополнительной информации по наблюдаемым воздушным судам и обстановке на взлетно-посадочной полосе и рулежных дорожках. В отдельную группу могут быть выделены метеорологические РЛС, предназначенные для оперативного снабжения командного, летного и диспетчерского состава данными о метеорологической обстановке.
В нормах и рекомендациях ИКАО, Постоянной комиссии по радиотехнической и электронной промышленности СЭВ предусмотрено разделение радиолокационных средств на первичные и вторичные. Часто первичные радиолокационные станции (ПРЛС) и ВРЛС объединяют по принципу функционального использования и определяют как радиолокационный комплекс (РЛК). Однако характер получаемой информации, особенно построения аппаратуры, позволяет рассматривать данные станции отдельно.
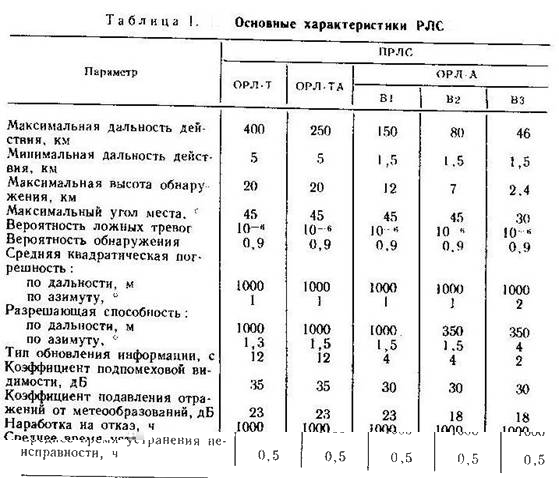
Исходя из сказанного РЛС целесообразно объединить в следующие трастовые обзорные радиолокаторы ОРЛ-Т с максимальной дальностью действия около 400 км;
трассовые и аэроузловые радиолокаторы ОРЛ-ТА с максимальной дальностью действия порядка 250 км;
аэродромные обзорные радиолокаторы ОРЛ-А (варианты В1, В2, ВЗ) с максимальной дальностью действия 150, 80 и 46 км соответственно;
посадочные радиолокаторы (ПРЛ);
вторичные радиолокаторы (ВРЛ);
комбинированные обзорно-посадочные радиолокаторы (ОПРЛ);
радиолокаторы обзора летного поля (ОЛП);
метеорологические радиолокаторы (МРЛ).
В данной курсовой работе рассматривается принцип построения РЛС управления воздушным движением.
1. Теоретическая часть
1.1. Общая характеристика РЛС УВД
радиолокационный управление воздушный движение
В современных авторизированных системах (АС) управления воздушного движения (УВД) применяются РЛС третьего поколения. Переоснащение предприятий гражданской авиации занимает обычно длительный период, поэтому в настоящее время наряду с современными РЛС применяются РЛС второго и даже первого поколений. РЛС различных поколений отличаются, прежде всего, элементной базой, способами обработки радиолокационных сигналов и защиты РЛС от помех.
РЛС первого поколения начали широко применятся с середины 60-х годов. К ним относятся трассовые РЛС типа П-35 и аэродромные РЛС типа тАЬЭкрантАЭ. Эти радиолокаторы построены на электровакуумных приборах с применением навесных элементов и объемного монтажа.
РЛС второго поколения начали применяться в конце 60-х - начале 70-х годов. Повышение требований к источникам радиолокационной информации системы УВД привело к тому, что радиолокаторы этого поколения превратились в сложные многорежимные и многоканальные радиолокационные комплексы (РЛК). Радиолокационный комплекс второго поколения состоит из РЛС со встроенным радиолокационным каналом и аппаратуры первичной обработки информации (АПОИ). Ко второму поколению относятся трастовые РЛК ВлСкалаВ» и аэродромные РЛК ВлИртышВ». В этих комплексах наряду с электровакуумными приборами начали широко применяться твердотельные элементы, модули и микромодули в сочетании с монтажом на основе печатных плит. Основной схемой построения первичного канала РЛК стала двухканальная схема с разносом частот, которая позволила повысить показатели надежности и улучшить характеристики обнаружения по сравнению с РЛС первого поколения. В РЛС второго поколения начали применяться более совершенные средства защиты от помех.
Опыт эксплуатации РЛС и РЛК второго поколения показал, что в целом они недостаточно полно удовлетворяют требованиям АС УВД. В частности, к их существенным недостаткам относятся ограниченное применение в аппаратуре современных средств цифровое обработки сигналов, малый динамический диапазон приемного тракта и др. Данные РЛС и РЛК используются в настоящее время в неавтоматизированных и автоматизированных системах УВД.
Первичные РЛС и РЛК третьего поколения начали использоваться в гражданской авиации нашей страны как основные источники радиолокационной информации АС УВД с 1979 г. Главное требование, которое определяет особенности РЛС и РЛК третьего поколения, - обеспечение стабильного уровня ложных тревог на выходе РЛС. Это требование выполняется благодаря адаптивным свойствам первичных РЛС третьего поколения. В адаптивных РЛС осуществляются анализ в реальном масштабе времени помеховой обстановки и автоматическое управление режимом работы РЛС. С этой целью вся зона обзора РЛС разбивается на ячейки, для каждой из которых в результате анализа за один или несколько периодов обзора принимается отдельное решение о текущем уровне помех. Адаптация РЛС к изменениям помеховой обстановки обеспечивает стабилизацию уровня ложных тревог и уменьшает опасность перегрузки АПОИ и аппаратуры передачи данных в центр УВД.
Элементной базой РЛС и РЛК третьего поколения являются интегральные микросхемы. В современных РЛС начинают широко применятся элементы вычислительной техники и, в частности, микропроцессоры, которые служат основой технической реализации адаптивных систем обработки радиолокационных сигналов.
1.2. Задачи и основные параметры РЛС
Назначение РЛС - обнаружение и определение координат воздушных судов (ВС) в зоне ответственности радиолокатора. Первичные радиолокационные станции позволяют обнаружить и измерить наклонную дальность и азимут ВС методом активной радиолокации, используя отраженные от целей зондирующие сигналы радиолокатора. Они работают в импульсном режиме с высокой (100 .. 1000) скважностью. Круговой обзор контролируемого воздушного пространства осуществляется с помощью вращающейся антенны, обладающей остронаправленной ДНА в горизонтальной плоскости.
В табл. 1 приведены основные характеристики обзорных РЛС и их численные значения, регламентированные нормами СЭВтАФИКАО.
Рассматриваемые РЛС имеют значительное число общих черт и зачастую выполняют аналогичные операции. Им присуща идентичность структурных схем. Основные их отличия обусловлены различными особенностями функционального использования в иерархически сложной системе УВД.
1.3. Особенности первичных РЛС
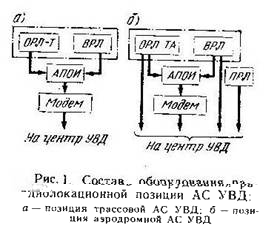
Типовая структурная схема первичной РЛС (рис. 1) состоит из следующих основных узлов: антенно-фидерной системы (АФС) с механизмом привода (МПА); датчика угловых положений (ДУА) и канала подавления боковых лепестков (КП); передатчика (Прд) с устройством автоматической подстройки частоты (АПЧ); приемника (Прм); аппаратуры выделения и обработки сигналов (АВОС) - в ряде современных и перспективных радиолокационных станций и комплексов, объединяемых с приемником в процессор обработки сигналов; синхронизирующего устройства (СУ), тракта трансляции сигналов к внешним устройствам обработки и отображения (ТС); контрольного индицирующего устройства (КМ), обычно работающего в режиме ВлАналогВ» или ВлСинтетикаВ»; системы встроенного контроля (ВСК).
Основная антенна, входящая в состав АФС, предназначена для формирования ДНА, имеющей в вертикальной плоскости ширину 30 .. 40º, а в горизонтальной плоскости ширину 1 ..2В°. Малая ширина ДНА в горизонтальной плоскости обеспечивает необходимый уровень разрешающей способности по азимуту. Для уменьшения влияния дальности обнаружения ВС на уровень отражения от цели сигналов ДНА в вертикальной плоскости часто имеет форму, подчиняющуюся закону Cosec2 θ, где θ - угол места.
Канал подавления боковых лепестков ДН запросной антенны (при работе РЛС в активном режиме, т. е. при использовании встроенного или параллельно работающего ВРЛ) предназначен для уменьшений вероятностей ложных срабатываний самолетного ответчика. Конструктивно более проста система подавления боковых лепестков по ответу.
В большинстве РЛС в АФС используются два облучателя, один из которых обеспечивает обнаружение ВС на малых высотах, т. е. под малыми углами места. Особенностью ДН в вертикальной плоскости является градация ее конфигурации, особенно в нижней части, чем достигается уменьшение помех от местных предметов и подстилающей поверхности. С целью повышения гибкости юстирования РЛС предусмотрена возможность изменения максимума ДНА по углу 9 в пределах 0 .. 5º относительно горизонтальной плоскости. В состав АФС входят устройства, позволяющие изменять поляризационные характеристики излучаемых и принимаемых сигналов. Так, например, применение круговой поляризации позволяет ослабить на 15 .. 22 дБ сигналы, отраженные от метеообразований.
Отражатель антенны, выполненный из металлической сети, по форме близок к усеченному параболоиду вращения. В современных РЛС УВД используются также радиопрозрачные покрытия, защищающие АФС от осадков и ветровой нагрузки. На отражателе антенны монтируют антенны ВРЛ и антенну канала подавления.
Механизм привода антенны обеспечивает ее равномерное вращение. Частота вращения антенны определяется требованиями информационного обеспечения диспетчеров службы движения, ответственных за различные этапы полета. Как правило, предусмотрены варианты секторного и кругового обзора пространства.
Определение азимута ВС осуществляется с помощью считывания информации в системе координат, заданных для индицирующего устройства РЛС. Датчики угловых положений антенны предназначены для получения дискретных или аналоговых сигналов, являющихся базовыми для выбранной системы координат.
Передатчик предназначен для получения радиоимпульсов длительностью 1 .. 3 мкс. Частотный диапазон работы выбирается исходя из назначения РЛС. С целью снижения потерь, вызванных флуктуациями цели, увеличения числа импульсов, отраженных от цели за один обзор, а также с целью борьбы со слепыми скоростями применяют двухчастотное зондирование пространства. При этом рабочие частоты отличаются на 50..100 МГц.
Временные характеристики зондирующих импульсов зависят от функционального использования РЛС. В ОРЛ-Т используются зондирующие импульсы с длительностью порядка 3 икс, следующие с частотой повторений 300 .. 400 Гц, а ОРЛ-А имеют длительность импульса не более 1 мкс при частоте повторения 1 кГц. Мощность передатчика не превосходит 5МВт.
Для обеспечения заданной точности частоты генерируемых колебаний СВЧ, а также для нормальной работы схемы СДЦ используется устройство автоматической подстройки частоты (АПЧ). В качестве источника опорных колебаний в устройствах АПЧ используют стабильный местный гетеродин приемника. Скорость авто подстройки достигает единиц мегагерц на секунду, что позволяет снизить влияние АПЧ на эффективность работы системы СДЦ. Значение остаточной расстройки реальной величины частоты по отношению к номинальному значению не превосходит 0,1 .. 0,2 МГц.
Обработка сигналов по заданному алгоритму осуществляется в приемно-анализирующем устройстве РЛС в случае, когда Прм и АВОС практически неразличимы.
В общем случае приемник выполняет функции выделения, усиления и преобразования принимаемых эхо-сигналов. Особенностью приемников РЛС является наличие малошумящего усилителя высокой частоты, позволяющего снизить коэффициент шума приемника и тем самым увеличить дальность обнаружения цели. Среднее значение коэффициента шума приемников лежит в пределах 2 .. 4 дБ, а чувствительность составляет 140 дБ/Вт. Промежуточная частота обычно равна 30 МГц, двойное преобразование частоты в РЛС УВД практически не используется, коэффициент усиления УПЧ около 20 .. 25 дБ. В некоторых РЛС с целью расширения динамического диапазона входных сигналов используют усилители с ЛАХ.
В свою очередь для сужения диапазона входных сигналов, поступающих на АПОИ, используют АРУ, а также ВАРУ, повышающую коэффициент усиления УПЧ при работе на предельных дальностях обнаружения.
С выхода УПЧ сигналы идут по каналам амплитудного и фазового
детектирования.
Аппаратура временной обработки сигнала (АВОС) выполняет функцию фильтрации полезного сигнала на фоне помех. Наибольшей интенсивностью обладают непреднамеренные помехи от радиотехнических средств, расположенных в радиусе до 45 км от РЛС.
Аппаратурные средства борьбы с электромагнитными помехами включают специальные устройства коммутации и управления ДН, схемы ВАРУ, уменьшающие динамический диапазон входных сигналов от близкорасположенных целей, устройства бланкирования приемо-анализирующего тракта, фильтры синхронных и несинхронных помех и др.
Эффективным средством борьбы с помехами от неподвижных или слабо меняющих свое положение в пространстве и времени целей являются системы селекции движущихся целей (СДЦ), реализующие методы одно - или двукратной череспериодной компенсации. В ряде современных РЛС устройство селекции движущихся целей (СДЦ) реализует алгоритм цифровой обработки в квадратурных каналах, имея коэффициент подавления помех от неподвижных объектов 40 .. 43 дБ, а от метеопомех до 23 дБ.
Выходными устройствами АВОС являются параметрические и непараметрические обнаружители сигналов, позволяющие стабилизировать вероятность ложной тревоги на уровне 10-6.
При цифровой обработке сигналов АВОС представляет собой специализированный микропроцессор.
1.4. Трассовая обзорная РЛС ВлСкала - МВ»
Рассматриваемая РЛС представляет собой комплекс, в который входят ПРЛ и вторичный канал ВлКореньВ». РЛС предназначена для контроля и управления и может быть использована как в автоматизированных системах управления воздушным движением, так и в неавтоматизированных центрах УВД.
Основные параметры радиолокатора ВлСкала-МВ» приведены ниже.
Структурная схема РЛС ВлСкала-МВ» представлена на рис. 2. В ее состав входят первичный радиолокационный канал (ПРК), вторичный радиолокационный канал (ВРК), аппаратура первичной обработки информации (АПОИ) и коммутирующее устройство (КУ).
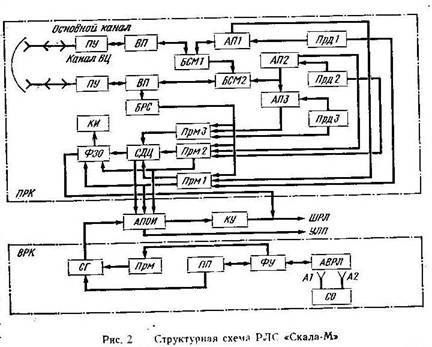
В ПРК входят: поляризационные устройства ПУ; вращающиеся переходы ВП, два блока сложения мощностей БСМ1 (2); антенные переключатели АП1 (2, 3); передатчики Прд (2, 3); блок разделения сигналов БРС; приемники Прм 1 (2, 3); система селекции движущихся целей СДЦ; устройство формирования зоны обнаружения ФЗО и контрольный индикатор КИ. Вторичный радиолокационный канал включает в себя: антенную систему ВРЛ АВРЛ; самолетный ответчик типа СОМ-64, используемый в качестве устройства, контролирующего работу ВРК-СО; фидерное устройство ФУ; приемопередающее устройство, используемое в режиме ВлRBSВ» ПП; устройство согласования СГ и приемное устройство, используемое в режиме УВД-ПРМ.
Съем и трансляция информации осуществляются с помощью широкополосной радиорелейной линии ШРЛ и узкополосной линии передачи УЛП.
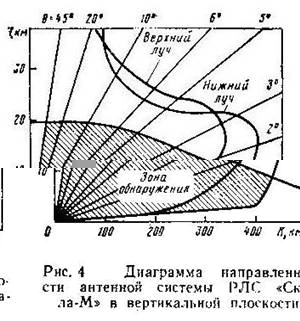
Первичный канал РЛС представляет собой двухканальное устройство и работает на трех фиксированных частотах. Нижний луч ДНА формируется облучателем основного канала, а верхний - облучателем канала индикации высоколетящих целей (ИВЦ). В РЛС реализована возможность одновременной обработки информации в когерентном и амплитудном режимах, что позволяет проводить оптимизацию зоны обзора, представленную на рис. 3.
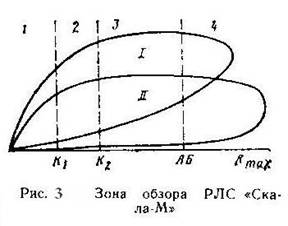
Границы зоны обнаружения устанавливаются в зависимости от помеховой ситуации. Их выбор определяется импульсами, вырабатываемыми в КИ, управляющими коммутацией в АПОИ и видеотракте.
Участок 1 имеет протяженность не более 40 км. Информация формируется при помощи сигналов верхнего луча. При этом подавление отражений от местных предметов в ближней зоне составляет 15 .. 20 дБ.
На участке 2 используются сигналы верхнего луча при работе приемо-анализирующего устройства в амплитудном режиме и сигналы нижнего луча, обработанные в системе СДЦ, причем в канале нижнего луча используется ВАРУ, имеющая динамический диапазон на 10 ..15 дБ больше, чем в канале верхнего луча, что обеспечивает контроль за местоположением ВС, находящимся под малыми углами места.
Второй участок заканчивается на таком удалении от РЛС, при котором эхо-сигналы от местных предметов, принимаемые нижним лучом, имеют незначительный уровень.
На участке 3 используются сигналы верхнего луча, а на 4 - нижнего луча. В приемо-анализирующем тракте осуществляется режим амплитудной обработки.
Вобуляция частоты запуска РЛС позволяет устранить провалы в амплитудно-скоростной характеристике и устранить неоднозначность отсчета. У ПРДЗ частота повторения зондирующих сигналов 1000 Гц, а у первых двух 330 Гц. Увеличенная частота следования повышает эффективность СДЦ за счет уменьшения влияния флюктуации местных предметов и вращения антенны.
Принцип работы аппаратуры ПРК заключается в следующем.
Высокочастотные сигналы передающих устройств подаются через антенные переключатели на устройства сложения мощностей и далее через вращающиеся сочленения и устройство управления поляризацией к облучателю нижнего луча. Причем на участках 1 и 2 зоны обнаружения используются сигналы первого приемопередатчика, поступающие по верхнему лучу и прошедшие обработку в СДЦ. На 3 - композиционные сигналы, поступающие по обоим лучам и обработанные в амплитудном канале первого и второго приемопередатчиков, а на 4 - сигналы первого и второго приемопередатчиков, поступающие по нижнему лучу и обработанные в амплитудном канале. При отказе любого из комплектов его место автоматически занимает третий приемопередатчик.
Устройства сложения мощностей производят фильтрацию принятых нижним лучом эхо-сигналов и в зависимости от несущей частоты передают их через АП на соответствующие приемо-анализирующие устройства. Последние имеют раздельные каналы обработки сигналов основного луча и луча канала индикации высоколетящих целей (ИВЦ). Канал ИВЦ работает только на прием. Его сигналы проходят поляризационное устройство и после блока разделения сигналов поступают на три приемника. Приемники выполнены по супергетеродинной схеме. Усиление и обработка сигналов промежуточной частоты выполняются в двухканальном УПЧ. В одном канале усиливаются и обрабатываются сигналы верхнего луча, в другом - нижнего.
Каждый из аналогичных каналов имеет два выхода: после амплитудной обработки сигналов и по промежуточной частоте для фазовых детекторов системы СДЦ. На фазовых детекторах выделяются синфазная и квадратурная составляющие.
После СДЦ сигналы поступают в АПОИ, объединяются с сигналами ВРК и далее подаются на аппаратуру отображения и обработки радиолокационной информации. В АС УВД в качестве АПОИ может использоваться экстратор СХ-1000. а в качестве устройств трансляции-модемы СН-2054.
Вторичный радиолокационный канал обеспечивает получение координатной и дополнительной информации от ВС, оборудованных ответчиками в режимах ВлУВДВ» или ВлRBSВ». Форма сигналов в режиме запроса определяется нормами ИКАО, а при приеме - нормами ИКАО или отечественного канала в зависимости от режима работы ответчиков. Структурная схема и параметры аппаратуры вторичного канала аналогичны автономному ВРЛ типа ВлКорень-АСВ».
1.5. Особенности функциональных узлов РЛС ВлСкала - МВ»
Антенно-фидерное устройство ПРК состоит из антенны, формирующей ДНА, и фидерного тракта, содержащего коммутирующие устройства.
Конструктивно антенна первичного канала выполнена в виде параболического отражателя размером 15x10,5 м и двух рупорных облучателей. Нижний луч формируется однорупорным облучателем основного канала и отражателем, а верхний тАУ отражателем и однорупорным облучателем, расположенным ниже основного. Форма ДН в вертикальной плоскости cosec2θ , где θ тАУ угол места. Ее вид приведен на рис. 4.
Для уменьшения отражений от метеообразований предусмотрены поляризатор основного канала, обеспечивающий плавное изменение поляризации излучаемых сигналов от линейной до круговой, и поляризатор канала ИВЦ, постоянно построенный на круговую поляризацию.
Развязка между устройствами сложения мощностей не менее 20 дБ, а развязка между отдельными каналами не менее 15 дБ. В волноводном тракте предусмотрена возможность регистрации коэффициента стоячих волн не менее 3, при f,cjk.nyjq погрешности измерения 20 %.
Формирование ДНА вторичного канала производится отдельной антенной, аналогичной антенне ВРЛ типа ВлКорень - АСВ», расположенной на отражателе основной антенны. На дальностях, превышающих 5 км, обеспечивается сектор подавления сигналов по боковым лепесткам в пределах 0.360º.
Обе антенны помещены над радиопрозрачным куполом, что позволяет существенно снизить ветровую нагрузку и повысить защиту от атмосферных воздействий.
Передающая аппаратура первичного канала предназначена для генерирования импульсов СВЧ длительностью 3.3 мкс со средней мощностью в импульсе 3.6 кВт, а также для формирования опорных сигналов промежуточной частоты для фазовых детекторов и сигналов гетеродинных частот для смесителей приемоанализирующих трактов. Передатчики выполнены по типовому для истинно когерентных РЛС принципу, что позволяет получить достаточную фазовую стабильность. Сигналы несущей частоты получаются путем преобразования частоты задающего генератора промежуточной частоты, имеющего кварцевую стабилизацию.
Оконечным каскадом передатчика является усилитель мощности, выполненный на пролетном клистроне. Модулятор выполнен в виде накопителя с полным разрядом из пяти параллельно включенных модулей. Несущие частоты и частоты гетеродина имеют следующие значения: f1=1243 МГц; fГ1=1208 МГц; f2=1299 МГц; fГ2=1264 МГц; f3=1269 МГц; fГ3=1234 МГц.
Приемный тракт ПРК предназначен для усиления, селектирования, преобразования, детектирования эхо-сигналов, а также для ослабления сигналов, отраженных от метеообразований.
Каждый из трех приемоанализирующих трактов имеет два канала тАУ основной и индикации высотных целей и выполнен по супергетеродинной схеме с однократным преобразованием частоты. Выходные сигналы с приемников подаются на СДЦ (по промежуточной частоте) и на формирователь зоны обнаружения тАУ видеосигналы.
В приемниках осуществляется обработка сигналов в линейном и логарифмическом амплитудных подканалах, а также в когерентном подканале, чем достигается стабилизация уровня ложных тревог до уровня собственных шумов в логарифмическом видеоусилителе.
Частичное восстановление динамического диапазона осуществляется с помощью видеоусилителей с антилогарифмической амплитудной характеристикой. Для сжатия динамического диапазона эхо-сигналов на малых дальностях, а также ослабления ложного приема по боковым лепесткам ДНА применена ВАРУ. Имеется возможность временного бланкирования одной или двух областей при интенсивном воздействии помех.
В каждом приемном канале обеспечивается поддержание заданных уровней шумов (схема ШАРУ) на выходах каналов с точностью не менее 15 %.
Цифровое устройство СДЦ имеет два идентичных канала, в которых обрабатываются синфазная и квадратурная составляющая. Выходные сигналы с фазовых детекторов после обработки во входных устройствах аппроксимируются ступенчатой функцией с шагом дискретизации 27 мкс. Затем они поступают на АЦП, где преобразуются в 8-миразрядный код и вводятся в запоминающее и вычислительное устройства. Запоминающее устройство рассчитано на запоминание 8-миразрядного кода в 960 квантах дальности.
В СДЦ предусмотрена возможность двойного и тройного череспериодного вычитания сигналов. Квадратичное сложение осуществляется в экстракторе модуля, а устройство ЛОГ-МПВ-АНТИЛОГ производит селекцию видеоимпульсов по длительности и восстанавливает динамический диапазон выходных видеоимпульсов. Предусмотренный в схеме редиркуляционный накопитель позволяет повысить сигнал-шум и является средством защиты от несинхронных импульсных помех. С него сигналы поступают на ЦАП, усиливаются и подаются на АПОИ и КУ. Дальность действия СДЦ при частоте повторения fп=330 Гц тАУ 130 км, fп=1000Гц тАУ 390 км, а коэффициент подавления сигналов от неподвижных объектов 40 дБ.
1.6. Патентный поиск
Рассмотренная выше РЛС третьего поколения появилась в 80-х годах. В мире существует большое количество подобных комплексов. Рассмотрим несколько запатентованных устройств УВД и их характеристики.
В США в 1994 году появились несколько патентов различные РЛС УВД.
1. G01S9/56
342-37
920616 Том 1139 №3
Способ и устройство для системы воспроизведения информации наземной РЛС.
Система управления воздушным движением /УВД/ содержит РЛС обнаружения, радиомаяк и общий цифровой кодер для сопровождения самолетов и устранения возможности столкновений. В процессе передачи данных на систему УВД производится сбор данных, поступающих с общего цифрового кодера, при этом для всех сопровождаемых самолетов собираются данные о дальности и азимуте. Из общего массива данных отфильтровываются данные, не относящиеся к местонахождению сопровождаемых самолетов. В результате формируется сообщение о траектории с полярными координатами. Полярные координаты преобразуются в прямоугольные, после чего формируется и кодируется блок данных, несущий информацию о всех самолетах, сопровождаемых системой УВД. Блок данных формируется вспомогательным компьютером. Блок данных считывается во временное ЗУ и передается на приемную станцию. На приемной станции принятый блок данных декодируется и воспроизводится в виде, приемлемом для восприятия человеком.
Переводчик И.М.ЛеоненкоВа Редактор О.В.Иванова
2. G01S13/56,13/72
342-52
920728 Том 1140 №4
Обзорная РЛС с вращающейся антенной.
Обзорная РЛС содержит вращающуюся антенну для получения информации о дальности и азимуте обнаруженного объекта и электрооптический датчик, вращающийся вокруг оси вращения антенны, для получения дополнительной информации о параметрах обнаруженного объекта. Антенна и датчик вращаются несинхронно. С антенной электрически соединено устройство, которое при каждом обороте антенны определяет азимут, дальность и доплеровскую скорость обнаруженных объектов. С электрооптическим датчиком соединено устройство, которое при каждом обороте датчика определяет азимут и угол места объекта. К устройствам, определяющим координаты объекта, избирательно подключается общий блок сопровождения, объединяющий полученную информацию и выдающий данные для сопровождения обнаруженного объекта.
2. Безопасность и экологичность проекта
2.1. Безопасная организация рабочего места инженера ПЭВМ
Парк персональных электронно-вычислительных машин (ПЭВМ) и видеодисплейных терминалов (ВДТ) на электронно-лучевых трубках (ЭЛТ) значительно увеличивается. Компьютеры проникают во все сферы жизни современного общества и используются для получения, передачи и обработки информации на производстве, в медицине, банковских и коммерческих структурах, образовании и т.д. Даже при разработке, создании и освоении новых изделий не обойтись без компьютеров.
На рабочем месте должны быть предусмотрены меры защиты от возможного воздействия опасных и вредных факторов производства. Уровни этих факторов не должны превышать предельных значений, оговоренных правовыми, техническими и санитарно-техническими нормами. Эти нормативные документы обязывают к созданию на рабочем месте условий труда, при которых влияние опасных и вредных факторов на работающих либо устранено совсем, либо находится в допустимых пределах
2.2. Потенциально опасные и вредоносные производственные факторы при работе с ПЭВМ
ВаИмеющийся в настоящее время комплекс разработанных организационных мероприятий и технических средств защиты, накопленный опыт работы ряда вычислительных центров (далее ВЦ) показывает, что имеется возможность добиться значительно больших успехов в деле устранения воздействия на работающих опасных и вредных производственных факторов.
Опасным называется производственный фактор, воздействие которого на работающего человека в определенных условиях приводит к травме или другому внезапному резкому ухудшению здоровья. Если же производственный фактор приводит к заболеванию или снижению трудоспособности, то его считают вредным. В зависимости от уровня и продолжительности воздействия вредный производственный фактор может стать опасным.
Состояние условий труда работников ВЦ и его безопасности, на сегодняшний день, еще не удовлетворяют современным требованиям. Работники ВЦ сталкиваются с воздействием таких физически опасных и вредных производственных факторов, как повышенный уровень шума, повышенная температура внешней среды, отсутствие или недостаточная освещенность рабочей зоны, электрический ток, статическое электричество и другие.
ВаМногие сотрудники ВЦ связаны с воздействием таких психофизиологических факторов, как умственное перенапряжение, перенапряжение зрительных и слуховых анализаторов, монотонность труда, эмоциональные перегрузки. Воздействие указанных неблагоприятных факторов приводит к снижению работоспособности, вызванное развивающимся утомлением. Появление и развитие утомления связано с изменениями, возникающими во время работы в центральной нервной системе, с тормозными процессами в коре головного мозга.
Медицинские обследования работников ВЦ показали, что помимо снижения производительности труда высокие уровни шума приводят к ухудшению слуха. Длительное нахождение человека в зоне комбинированного воздействия различных неблагоприятных факторов может привести к профессиональному заболеванию. Анализ травматизма среди работников ВЦ показывает, что в основном несчастные случаи происходят от воздействия физически опасных производственных факторов при выполнении сотрудниками несвойственных им работ. На втором месте случаи, связанные с воздействием электрического тока.
2.3. Обеспечение электробезопасности при работе с ПЭВМ.
Электрический ток представляет собой скрытый тип опасности, т.к. его трудно определить в токо - и нетоковедущих частях оборудования, которые являются хорошими проводниками электричества. Смертельно опасным для жизни человека считают ток, величина которого превышает 0,05А. С целью предупреждения поражений электрическим током к работе должны допускаться только лица, хорошо изучившие основные правила по технике безопасности.
Электрические установки, к которым относится практически все оборудование ПЭВМ, представляют для человека большую потенциальную опасность, так как в процессе эксплуатации или проведении профилактических работ человек может коснуться частей, находящихся под напряжением. Специфическая опасность электроустановок тАУ токоведущие проводники, оказавшегося под напряжением в результате повреждения (пробоя) изоляции, не подают каких-либо сигналов, которые предупреждают человека об опасности. Реакция человека на электрический ток возникает лишь при протекании последнего через тело человека. Исключительно важное значение для предотвращения электротравмотизма имеет правильная организация обслуживания действующих электроустановок ВЦ, проведения ремонтных, монтажных и профилактических работ.
С целью уменьшения опасности поражения электрическим током необходимо провести комплекс мероприятий по повышению электробезопасности приборов, устройств и помещений, связанных с процессом проектирования, производства и эксплуатации устройства, в соответствии с ГОСТ 12.1.019-79* ВлЭлектробезопасность. Общие требованияВ» [30]. Эти мероприятия технические и организационные. Например, в качестве технических мер, может быть применение двойной изоляции ГОСТ 12.2.006-87*, а в качестве организационных мер, может быть проведение инструктажа, проверка электрооборудования на исправность, качества изоляции, заземления, обеспечение средств первой медицинской помощи и др.
2.4. Электростатические заряды и их опасность
Электростатическое поле (ЭСП) возникает за счет наличия электростатического потенциала (ускоряющего напряжения) на экране дисплея. При этом появляется разность потенциалов между экраном дисплея и пользователем ПЭВМ. Наличие ЭСП в пространстве вокруг ПЭВМ приводит, в том числе к тому, что пыль из воздуха оседает на клавиатуре и затем проникает в поры на пальцах, вызывая заболевания кожи вокруг рук.
ЭСП вокруг пользователя ПЭВМ зависит не только от полей, создаваемых дисплеем, но также от разности потенциалов между пользователем и окружающими предметами. Эта разность потенциалов возникает, когда заряженные частицы накапливаются на теле в результате ходьбы по полу с ковровым покрытием при трении материалов одежды друг о друга и т.п.
В современных моделях дисплеев приняты кардинальные меры для снижения электростатического потенциала экрана. Но нужно помнить, что разработчиками дисплеев применяются различные технические способы для борьбы с данным фактом, в том числе и так называемый компенсационный способ, особенность которого заключается в том, что снижение потенциала экрана до требуемых норм обеспечивается лишь в установившемся режиме работы дисплея. Соответственно, подобный дисплей имеет повышенный (в десятки раз более установившегося значения) уровень электростатического потенциала экрана в течение 20.30 секунд после своего включения и до нескольких минут после выключения, что достаточно для электризации пыли и близлежащих предметов.
1. Меры и средства подавления статической электризации.
Меры защиты от статического электричества направлены на предупреждение возникновения и накопления зарядов статического электричества, создание условий рассеивания зарядов и устранение опасности их вредного воздействия.
Устранение образования значительных статического электричества достигается при помощи следующих мер:
В· Заземление металлических частей производственного оборудования;
В· Увеличение поверхностной и объемной проводимости диэлектриков;
В· Предотвращение накопления значительных статических зарядов путем установки в зоне электрозащиты специальных нейтрализаторов.
2.5 Обеспечение электромагнитной безопасности
Большинство ученых считают, что как кратковременное, так и длительное воздействие всех видов излучения от экрана монитора не опасно для здоровья персонала, обслуживающего компьютеры. Однако исчерпывающих данных относительно опасности воздействия излучения от мониторов на работающих с компьютерами не существует и исследования в этом направлении продолжаются .
Допустимые значения параметров неионизирующих электромагнитных излучений от монитора компьютера представлены в табл. 1.
Максимальный уровень рентгеновского излучения на рабочем месте оператора компьютера обычно не превышает 10мкбэр/ч, а интенсивность ультрафиолетового и инфракрасного излучений от экрана монитора лежит в пределах 10тАж100мВт/м2.
Допустимые значения параметров электромагнитных излучений (в соответствии с СанПиН 2.2.2.542-96)
Вместе с этим смотрят:
GPS-навигация
IP-телефония. Особенности цифровой офисной связи
РЖсторiя диктофону
РЖсторiя звтАЩязку та його розвиток
Автоматизация электротельфера