Метод кусочного размножения оценок при обработке реализаций сигналов ограниченного объема
Содержание
1. Обработка реализаций сигналов ограниченного объема
2. структурная схема устройства, реализующая метод кусочного размножения оценок
3. временные и частотные характеристики устройства, реализующего метод кусочного размножения оценок
выводы
Библиографический список
1.Обработка реализаций сигналов ограниченного объема
Существующие методы обработки широко применяются при решении прикладных задач в системах телекоммуникаций, метрологии, статистической обработки. Как правило, их использование определяется начальными условиями: модель взаимодействия полезной и шумовой составляющей; ограничения, накладываемые на компоненты модели обрабатываемого сигнала. Разнообразие методов обработки составляет разнообразие начальных условий, на которых они определены. Начальные условия большинства методов обработки пересекаются и, при решении конкретной задачи, существует возможность использования нескольких различных подходов к получению оценок полезного сигнала. Во многом это связано с тем, что при определении ряда начальных условий накладываются не жесткие ограничения, что образует ряд альтернативных подходов к обработке. В данных ситуациях необходимо решать задачу не только обработки сигнала, но и выбора наиболее приемлемого метода оценивания, что является более сложной задачей. К методу обработки предъявляются требования, которые во многих случаях трудно достичь при использовании только одного алгоритма. В общем случае такими требованиями являются: обработка сигналов, описываемых широким классом функций; эффективное подавление шума, который описывается широким классом случайных функций; простота реализации; возможность эффективно обрабатывать реализации различных объемов в условиях априорной неопределенности о составляющих анализируемого процесса.
Несмотря на противоречивость выдвигаемых требований, в ряде последних работ В.И. Марчука, В.Я. Катковника, К.О. Егиазаряна, Я. Астола предложены новые подходы и методы ослабления шумовой составляющей, позволяющие существенно расширить начальные условия обработки и сделать более мягкими ограничения на свойства составляющих математической модели, описывающей исходную реализацию.
В качестве модели обрабатываемого сигнала наиболее часто используется на практике аддитивная модель, которая определяется выражением:
 , (1)
, (1)
где  ВатАУ неслучайный полезный сигнал,
ВатАУ неслучайный полезный сигнал,  ВатАУ случайные составляющие, действующие на фоне полезного сигнала. Закон распределения каждой составляющей Варазличен.
ВатАУ случайные составляющие, действующие на фоне полезного сигнала. Закон распределения каждой составляющей Варазличен.
Математическая модель полезной составляющей Вав большинстве случаев является многокомпонентной, что осложняет ее анализ и обработку. В общем случае модель полезного сигнала Ваможно представить элементом множества гладких функций  , которое определяется следующим образом [4]:
, которое определяется следующим образом [4]:
 ,
,
где  ВатАУ максимальный порядок производной функции множества
ВатАУ максимальный порядок производной функции множества  .
.
Во множестве функций Ваможно выделить подмножество гармонических функций [4]:
 ,
,
а также часть пространства Васоставляет подпространство полиномиальных функций:
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (2)
Как правило, на практике рассматривают подмножество  , ограниченное условием
, ограниченное условием  . Принятое ограничение связано с условием гладкости, заключающееся в том, что любую модель из пространства Ваможно приблизить полиномами невысокой степени на интервале
. Принятое ограничение связано с условием гладкости, заключающееся в том, что любую модель из пространства Ваможно приблизить полиномами невысокой степени на интервале  Ва[1].
Ва[1].
При построении математической модели случайной (шумовой) составляющей (1) выдвигается предположение о том, что составляющие Ваимеют гауссовский закон распределения с нулевым математическим ожиданием [3]. Как и в случае полезного сигнала, шумовую составляющую в общем случае можно представить элементом множества случайных процессов  Ва[2]:
Ва[2]:
 .
.
В случае представления реализации результатов измерения в виде дискретного ряда выражение (1) запишется в виде [8]:
 ,
,  .ВаВаВаВаВаВаВаВаВаВаВаВа (3)
.ВаВаВаВаВаВаВаВаВаВаВаВа (3)
Таким образом, исходная реализация результатов измерений представляет собой ряд  , в котором значения получены в равноотстоящие моменты времени, то есть
, в котором значения получены в равноотстоящие моменты времени, то есть  . Для упрощения дальнейшего анализа полученных результатов измерений произведем нормировку значений
. Для упрощения дальнейшего анализа полученных результатов измерений произведем нормировку значений  Ваотносительно времени дискретизации
Ваотносительно времени дискретизации  . В результате
. В результате  , а выражение (3) представляется в виде суммы отсчетов дискретных рядов тАУ полезного сигнала и шумовой составляющей:
, а выражение (3) представляется в виде суммы отсчетов дискретных рядов тАУ полезного сигнала и шумовой составляющей:
 ,
,  . (4)
. (4)
Отсчетыполезного сигнала  Вапринадлежат к пространству . Отсчеты аддитивной шумовой составляющей принадлежат случайному процессу пространства .
Вапринадлежат к пространству . Отсчеты аддитивной шумовой составляющей принадлежат случайному процессу пространства .
Исходная последовательность представляет собой реализацию нестационарного случайного сигнала, математическое ожидание которого является функционально зависимым. Сложность обработки таких реализаций заключается в отсутствии априорных данных о функциональной зависимости математического ожидания [5]. Априорно неизвестна функциональная зависимость полезного сигнала  , но предполагается, что она относится к пространству функций Ва(2), шумовая составляющая принадлежит к пространству , а плотность ее распределения симметрична относительно математического ожидания. Наряду с априорной информацией о составляющих обрабатываемого сигнала, немаловажным является объем его реализации. В условиях проведения уникальных экспериментов и невозможности получить достаточных объемов реализаций ограничения на объем выборки являются самыми существенными. В условиях ограниченности объема реализации предполагается, что выборка составляет от 30 до 150 значений [2]. Для получения оценки полезной составляющей сигнала
, но предполагается, что она относится к пространству функций Ва(2), шумовая составляющая принадлежит к пространству , а плотность ее распределения симметрична относительно математического ожидания. Наряду с априорной информацией о составляющих обрабатываемого сигнала, немаловажным является объем его реализации. В условиях проведения уникальных экспериментов и невозможности получить достаточных объемов реализаций ограничения на объем выборки являются самыми существенными. В условиях ограниченности объема реализации предполагается, что выборка составляет от 30 до 150 значений [2]. Для получения оценки полезной составляющей сигнала  Ванеобходимо уменьшить дисперсию шумовой составляющей
Ванеобходимо уменьшить дисперсию шумовой составляющей  Вапутем осуществления сглаживания.
Вапутем осуществления сглаживания.
Таким образом, при таком определении начальных условий использование большинства существующих методов обработки ограниченно. В первую очередь это связано с зависимостью оптимальных значений их параметров обработки от формы полезной составляющей и закона распределения шума [2]. В большинстве случаев при такой постановке задачи производится сглаживание реализации простыми методами: простое скользящее среднее, взвешенное скользящее среднее, медианное сглаживание, экспоненциальное сглаживание и т.д. [1]. Следует отметить, что их использование на выборках ограниченного объема обладает существенными недостатками [3]. Решение задачи выделения полезной составляющей осуществляется методом наименьших квадратов с использованием наиболее подходящей аппроксимирующей функции в смысле определенного критерия. При этом оптимальный выбор аппроксимирующей функции крайне затруднителен в условиях априорной неопределенности. В работах Дж. Бендата и А. Пирсона, С.М. Переверткина и ряда других указывается на то, что наилучшее оценивание полезного сигнала достигается, когда исходный сигнал представлен ансамблем реализаций, а оценка полезного сигнала осуществляется путем их усреднения по сечениям. В связи с этим предлагается использовать метод выделения полезного сигнала (патент № 2257610), основанный на разбиении исходной реализации на перекрывающиеся интервалы одинаковой длины, с последующей оценкой на каждом из них полезного сигнала методом наименьших квадратов с полиномиальной аппроксимирующей функцией. Такой подход позволяет получить множество оценок полезного сигнала в каждом сечении процесса  Вас последующим их усреднением [1].
Вас последующим их усреднением [1].
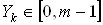
Согласно выражению (4) исходная выборка представляет собой последовательность отсчетов . Для получения оценки полезной составляющей разбиваем исходную реализацию Вана  Ваперекрывающихся интервалов, как показано на рис. 1. Длина каждого интервала фиксирована и равна априорно заданной величине
Ваперекрывающихся интервалов, как показано на рис. 1. Длина каждого интервала фиксирована и равна априорно заданной величине  . Разбиение формируется таким образом, что
. Разбиение формируется таким образом, что  Ваотсчетов предыдущего интервала содержится в последующем интервале. Данный способ разбиения позволяет сохранить корреляционные связи между отсчетами при последующем получении оценок полезного сигнала. Исходная последовательность Вас учетом предлагаемого разбиения перепишется в следующем виде
Ваотсчетов предыдущего интервала содержится в последующем интервале. Данный способ разбиения позволяет сохранить корреляционные связи между отсчетами при последующем получении оценок полезного сигнала. Исходная последовательность Вас учетом предлагаемого разбиения перепишется в следующем виде  , где
, где  Ва[9].
Ва[9].
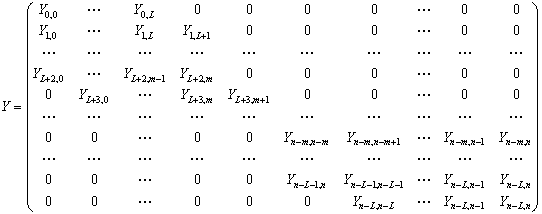
Исходный ряд  ,
,  Ваможно представить в виде матрицы размера
Ваможно представить в виде матрицы размера  :
:
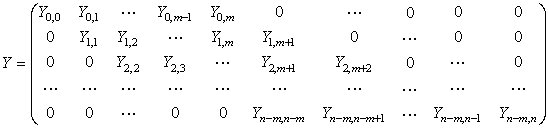 . (5)
. (5)
На каждом скользящем интервале производится оценка полезной составляющей (рис. 1). Как показано на рис. 1, полученные оценки группируются (группы оценок обведены овалами). Результирующая оценка получается путем усреднения множества оценок полезного сигнала, полученных в результате аппроксимации. На основе анализа предлагаемого разбиения исходной реализации выделим три участка:
 ,
, ,
, .
.
Рис. 1. Пример разбиения исходной реализации сигнала на перекрывающиеся интервалы постоянной длины
Выделение трех участков связано с тем, что в начале и конце реализации оценивание происходит по группам оценок различного объема. На первом интервале исходной выборки , количество оценок полезной составляющей в каждый момент времени пропорционально номеру отсчета  , на втором интервалеВатАУ количество оценок равно ширине скользящего интервала и составляет
, на втором интервалеВатАУ количество оценок равно ширине скользящего интервала и составляет  Вазначение, а на последнем интервале оценивания , с ростом номера отсчета Ваколичество оценок в каждом сечении уменьшается от Вадо 1 (рис. 1).
Вазначение, а на последнем интервале оценивания , с ростом номера отсчета Ваколичество оценок в каждом сечении уменьшается от Вадо 1 (рис. 1).
Оценка исходного ряда (5) представляет собой также матрицу такого же размера :
 . (6)
. (6)
Матрица (6) получается в результате оценивания полезной составляющей по значениям  , ,
, ,  Вакаждой строчки матрицы (5). Для перехода от матричного представления оценки обратно к одномерной реализации необходимо усреднить ее значения по столбцам. Результирующая оценка полезной составляющей запишется в следующем виде:
Вакаждой строчки матрицы (5). Для перехода от матричного представления оценки обратно к одномерной реализации необходимо усреднить ее значения по столбцам. Результирующая оценка полезной составляющей запишется в следующем виде:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа Ва(7)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа Ва(7)
Значения оценок, составляющие матрицу (6), получены путем аппроксимации исходной реализации , для каждого Ваметодом наименьших квадратов. Таким образом,  Васоответствует номеру строки матрицы оценок
Васоответствует номеру строки матрицы оценок  Ва(6). В работе [9] приведены результаты исследования для случая, когда на каждом интервале Вапроизводится аппроксимация функциями пространства (2), при этом оно ограничено условием
Ва(6). В работе [9] приведены результаты исследования для случая, когда на каждом интервале Вапроизводится аппроксимация функциями пространства (2), при этом оно ограничено условием  . Полученные результаты являются частными и не позволяют исследовать зависимость погрешности оценивания от параметров метода обработки. Для проведения таких исследований необходимо получить общее решение задачи аппроксимации на каждом скользящем участке для аппроксимирующего полинома произвольной степени
. Полученные результаты являются частными и не позволяют исследовать зависимость погрешности оценивания от параметров метода обработки. Для проведения таких исследований необходимо получить общее решение задачи аппроксимации на каждом скользящем участке для аппроксимирующего полинома произвольной степени  . Использование ранее предложенного подхода имеет следующие недостатки [5]:
. Использование ранее предложенного подхода имеет следующие недостатки [5]:
- минимизация целевой функции метода наименьших квадратов при произвольной степени  Вааппроксимирующего полинома сводится к решению системы
Вааппроксимирующего полинома сводится к решению системы  Вауравнения, что приводит к значительным вычислительным затратам при больших ;
Вауравнения, что приводит к значительным вычислительным затратам при больших ;
- в случае, если необходимо увеличить или уменьшить степень аппроксимирующего полинома, производится полный пересчет всех ранее полученных коэффициентов и оценок.
Использование системы ортогональных многочленов позволяет устранить эти недостатки.
Исходная дискретная последовательность  Ваопределена в
Ваопределена в  Ваузле. Введем систему ортогональных многочленов
Ваузле. Введем систему ортогональных многочленов  ВаЛежандра, где
ВаЛежандра, где  Вапоследовательно возрастающих степеней, обладающие свойством [5]:
Вапоследовательно возрастающих степеней, обладающие свойством [5]:
 ,
,
где  ВатАУ некоторая весовая функция. Будем рассматривать случай, когда
ВатАУ некоторая весовая функция. Будем рассматривать случай, когда  .
.
Таким образом, имея систему ортогональных многочленов, можно построить многочлен наилучшего приближения в смысле минимума квадратичной целевой функции. В общем случае аппроксимирующую полиномиальную функцию можно представить в виде [5]:
 . (8)
. (8)
Отметим, что полином (8) также принадлежит к пространству (2).
В соответствии с общей теорией ортогональных многочленов коэффициенты  Ваопределяются выражением [5]:
Ваопределяются выражением [5]:
 , (9)
, (9)
где  ВатАУ норма ортогональных многочленов.
ВатАУ норма ортогональных многочленов.
В соответствии с предлагаемым методом разбиения оценки коэффициентов Ваполинома (8) на каждом скользящем интервале Варазличны, тогда выражение (9) перепишется в следующем виде:
 ,
,
где  , ВатАУ длина интервала разбиения.
, ВатАУ длина интервала разбиения.
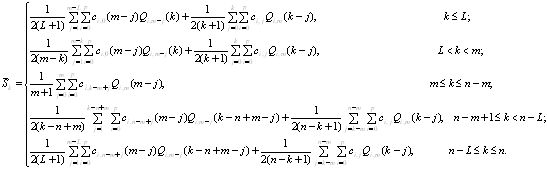
Анализ выражения для  Вапоказывает, что коэффициенты зависят не только от степени полинома, но и от номера интервала . В соответствии с выражением (7) результирующая оценка полезного сигнала через системы ортогональных многочленов запишется в следующем виде:
Вапоказывает, что коэффициенты зависят не только от степени полинома, но и от номера интервала . В соответствии с выражением (7) результирующая оценка полезного сигнала через системы ортогональных многочленов запишется в следующем виде:
кусочное размножение оценка сигнал
 ВаВаВаВаВа (10)
ВаВаВаВаВа (10)
где индекс  Вав
Вав  Вапоказывает степень аппроксимирующего полинома на каждом скользящем интервале.
Вапоказывает степень аппроксимирующего полинома на каждом скользящем интервале.
Выражение (10) представляет собой обобщенное уравнение, которое позволяет получить оценку полезной составляющей предлагаемым способом разбиения с последующей аппроксимацией на каждом скользящем интервале полиномом произвольной степени . Так как пространство аппроксимирующих функций (2) ограничено условием , то на основе выражения (10) можно получить частные случаи при  ,
,  Ваи
Ваи  Ва[9].
Ва[9].
В случае, когда , выражение (10) запишется в следующем виде:
 Ва(11)
Ва(11)
При Вавыражение (10) имеет вид:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (12)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (12)
При  Вавыражение (10) имеет вид:
Вавыражение (10) имеет вид:
 ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (13)
ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (13)
Выражения (11)тАУ(13) эквивалентны ранее полученным выражениям в работе [2]. В отличие от выражений, полученных на основе неортогональных полиномов [2], использование выражения (10) позволяет увеличить степень аппроксимирующего полинома без пересчета ранее полученных оценок. Анализ выражений (12) и (13) показывает, что степень аппроксимирующего полинома может быть увеличена путем вычисления дополнительных членов суммы. Такое свойство (10) позволяет модифицировать предлагаемый способ оценивания. Обладая дополнительной информацией о выделяемом полезном сигнале на локальном участке обработки, можно увеличивать или уменьшать степень аппроксимирующего полинома, тем самым ввести элементы адаптации.
На рис. 2 представлен пример разбиения исходной реализации на перекрывающиеся интервалы одинаковой длины и аппроксимации на каждом из функцией пространства (2) при , при этом модель исходной реализации представляет собой функцию этого же пространства с .
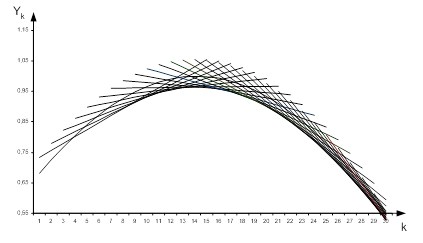
Рис. 2. Пример разбиения исходной реализации на пересекающиеся интервалы постоянной длины и аппроксимации на каждом из них значений сигнала линейной функцией
На рис. 3 представлены результаты вычисления оценки сигнала на основе выражения (12). Кривая 1 представляет собой исходный сигнал, а кривая 2 тАУ его оценку. Множество оценок полезного сигнала, полученные в каждый момент , представлены крестиками (рис. 3). На основе их значений в соответствии с выражением (12) получаем оценку полезной составляющей (кривая 2). Несовпадение исходной реализации с оценкой полезной составляющей на начальном участке реализации объясняется тем, что количество оценок полезной составляющей в каждый момент Ваявляется неодинаковым и увеличивается до момента  . При
. При  Ваколичество оценок постоянно и равно длине выбранного ранее окна , а ошибка оценки полезного сигнала меньше, чем
Ваколичество оценок постоянно и равно длине выбранного ранее окна , а ошибка оценки полезного сигнала меньше, чем  .
.
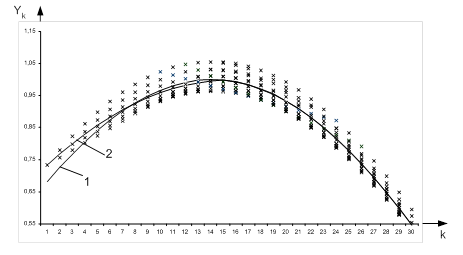
Рис. 3. Пример получения множества оценок полезного сигнала в каждом сечении исходного процесса (1) и формировании на их основе результирующей оценки (2) при отсутствии аддитивной шумовой составляющей
На рис. 2 и 3 представлена только часть реализации. Для третьего интервала оценивания Варезультат оценки схож с первым интервалом .
Недостатком предлагаемого метода обработки является то, что для первых и последних Вазначений исходной реализации множество оценок содержит различное количество элементов (рис. 1). Следствием этого является увеличение ошибки оценки полезной составляющей на интервалах  Ваи
Ваи  Ва(рис. 3). Для уменьшения погрешности оценки полезной составляющей на интервалах Ваи Вапредлагается модифицировать разбиение исходной реализации на этих интервалах. Для этого вводится дополнительный параметр
Ва(рис. 3). Для уменьшения погрешности оценки полезной составляющей на интервалах Ваи Вапредлагается модифицировать разбиение исходной реализации на этих интервалах. Для этого вводится дополнительный параметр  , который имеет смысл минимальной длины окна разбиения.
, который имеет смысл минимальной длины окна разбиения.
Для осуществления разбиения исходной реализации задается значение Ваи , при этом необходимо, чтобы выполнялось условие  . На начальном интервале Ваисходная реализация разбивается на перекрывающиеся интервалы с фиксированной левой границей и нарастающей длиной интервала разбиения от Вадо , как показано на рис. 4.
. На начальном интервале Ваисходная реализация разбивается на перекрывающиеся интервалы с фиксированной левой границей и нарастающей длиной интервала разбиения от Вадо , как показано на рис. 4.
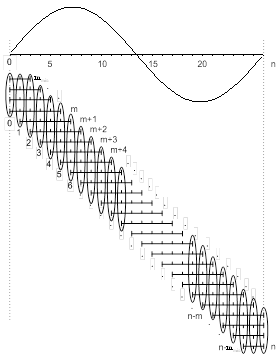
Рис. 4. Пример модифицированного разбиения исходной реализации на перекрывающиеся интервалы с изменяющейся длиной интервала разбиения в начале и конце выборки
На интервале Варазбиение исходной реализации осуществляется с уменьшением длины интервалов до минимального значения Вас фиксированной правой границей (рис. 4).
Обозначим минимальную длину интервала через  . Используя модифицированный подход разбиения исходного ряда, матрица (5) перепишется в следующем виде:
. Используя модифицированный подход разбиения исходного ряда, матрица (5) перепишется в следующем виде:
 . (14)
. (14)
Использование разбиения, представленного на рис. 4, позволяет получить на интервалах  Ваи Вадополнительные оценки полезной составляющей и тем самым уменьшить ее погрешность.
Ваи Вадополнительные оценки полезной составляющей и тем самым уменьшить ее погрешность.
При проведении аппроксимации на каждом интервале полиномом степени  Вавыражение (10) для вычисления результирующих оценок запишется в следующем виде:
Вавыражение (10) для вычисления результирующих оценок запишется в следующем виде:
 (15)
(15)
На рис. 5 представлен пример обработки реализации модифицированным методом кусочного размножения оценок полезной составляющей. Представлена часть реализации для интервала  .
.
Анализ рис. 5 показывает, что использование модифицированного подхода разбиения позволяет увеличить количество оценок на граничных интервалах Ваи . Сравнительный анализ результатов, представленных на рис. 3 и 5, показывает, что в случае использования модифицированного алгоритма оценки полезной составляющей ее значения более близко расположены к значениям исходного сигнала, чем для случая немодифицированного подхода.
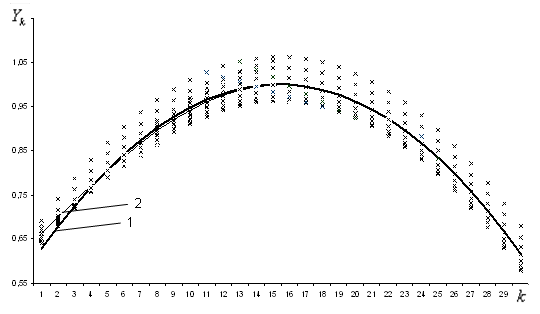
Рис. 5. Пример получения множества оценок полезного сигнала в каждом сечении исходного сигнала (1) и формирование на их основе результирующей оценки (2) при использовании модифицированного подхода разбиения исходной реализации на перекрывающиеся интервалы и отсутствии аддитивной шумовой составляющей
Предлагаемый метод обработки, несмотря на некоторую сложность представленных выражений, легко реализуется на современной элементной базе. Основу оценивания полезной составляющей на каждом элементарном интервале составляет метод наименьших квадратов с полиномиальной аппроксимирующей функцией. Условие обязательной полиномиальной аппроксимации на каждом участке является нежестким. Аппроксимация может быть произведена любой функцией из пространства (2). Так как интервал разбиения исходной выборки фиксирован, а также фиксирована аппроксимирующая функция в процессе обработки, это позволяет получить выражение оператора предлагаемого метода обработки.
2. структурная схема устройства, реализующая метод кусочного размножения оценок
Следует отметить, что предлагаемый метод обработки является симбиозом метода скользящего среднего и метода размножения оценок [3]. Используя выводы, при получении оценки полезного сигнала методом скользящего среднего, структурная схема устройства, его реализующая, показана на рис. 6. Устройство содержит буферный блок, блок аппроксимации, блок оценки и блок управления. Устройство, реализующее метод скользящего среднего, реализуется последовательной схемой. Исходная реализация поступает в буферный блок, где записываются первые  Вазначения
Вазначения  . С буферного блока последние Вазначения передаются в блок аппроксимации, где осуществляется их аппроксимация полиномиальной функцией, используя метод наименьших квадратов. Аппроксимирующей функцией является полином степени Вапространства (2). В блоке оценок осуществляется вычисление оценки полезного сигнала путем вычисления значения аппроксимирующего полинома в центральной точке интервала аппроксимации, что соответствует процедуре нахождения оценки методом простого скользящего среднего. Результирующая оценка поступает на выход устройства (рис. 6).
. С буферного блока последние Вазначения передаются в блок аппроксимации, где осуществляется их аппроксимация полиномиальной функцией, используя метод наименьших квадратов. Аппроксимирующей функцией является полином степени Вапространства (2). В блоке оценок осуществляется вычисление оценки полезного сигнала путем вычисления значения аппроксимирующего полинома в центральной точке интервала аппроксимации, что соответствует процедуре нахождения оценки методом простого скользящего среднего. Результирующая оценка поступает на выход устройства (рис. 6).
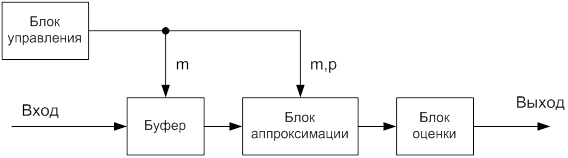
Рис. 6. Структурная схема устройства, реализующая метод скользящего среднего
С помощью блока управления задаются параметры обработки: длина скользящего интервала Ва(ширина скользящего окна) и степень аппроксимирующего полинома . В случае, когда Ваили , оценка на выходе устройства эквивалентна использованию метода простого скользящего среднего, а при Ваили  ВатАУ методу взвешенного скользящего среднего.
ВатАУ методу взвешенного скользящего среднего.
На рис. 7 представлена структурная схема устройства, реализующего метод кусочного размножения оценок (10). Устройство представляет собой набор из Ваканалов, каждый из которых содержит в себе блок задержки, буферный блок, блок аппроксимации, сумматор. Параметры обработки задаются с помощью блока управления. Значения исходной реализации через блоки задержки записываются в буферные блоки каждого из каналов.
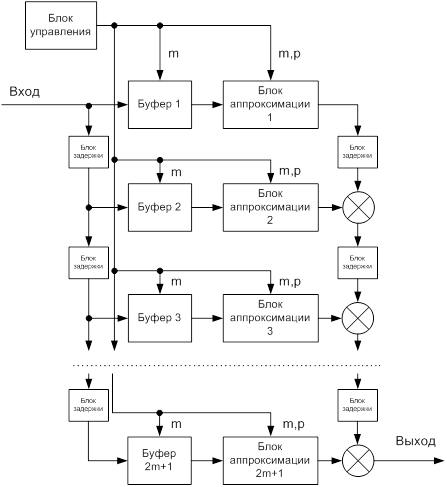
Рис. 7. Структурная схема устройства, реализующего метод кусочного размножения оценок
Все блоки задержки устройства являются идентичными и позволяют создавать задержку на один такт работы устройства. В каждом канале содержатся значения исходной реализации в m отсчетов, сдвинутые относительно друг друга на один такт, что соответствует используемому способу разбиения исходной реализации (рис. 1). Значения обрабатываемой реализации с буферных блоков поступают в блоки аппроксимации, где осуществляется их аппроксимация с помощью метода наименьших квадратов, используя полиномиальную аппроксимирующую функцию степени (рис. 7). В блоках аппроксимации вычисляются значения аппроксимирующих функции и производится их взвешивание (7). Значения аппроксимирующих функций через блоки задержки поступают на сумматоры (рис. 7). На выходе устройства формируется оценка полезного сигнала. С помощью блока управления определяется число каналов обработки; размер каждого буфера канала, который равен длине интервала разбиения реализации ; степень аппроксимирующего полинома Вав блоках аппроксимации. В случае , Ваи ВатАУ оценки на выходе устройства описываются выражениями (11), (12) и (13) соответственно. Структурная схема устройства, представленная на рис. 1, является одним из прототипов устройства, реализующего метод кусочного размножения оценок (рис. 7). В отличие от метода размножения оценок, интервал разбиения исходной реализации фиксирован, а оценку полезного сигнала можно получать по мере поступления данных. Структурная схема устройства, представленная на рис. 6, также является прототипом устройства, реализующего метод кусочного размножения оценок (рис. 7), но при всей схожести используется оценка полезного сигнала, полученного на всем интервале (10), в отличие от метода скользящего среднего, где она вычисляется только в его середине.
Приведенная структурная схема реализации устройства на основе метода кусочного размножения оценок является одним из вариантов. В каждом конкретном случае и в зависимости от используемого оборудования структурная схема может модифицироваться. Возможность распараллеливания вычислений при реализации метода кусочного размножения оценок позволяет реализовывать его на базе многопроцессорных систем.
В результате при реализации предлагаемого метода кусочного размножения оценок полезного сигнала устройство представляет собой дискретный фильтр, а использование непосредственного вычисления коэффициентов аппроксимирующего полинома и получение оценок на каждом интервале разбиения, с последующим усреднением их по полученным множествам, с вычислительной точки зрения не выгодно. Как правило, стационарная система характеризуется откликом на единичное воздействие. В связи с этим представляет интерес получить выражения отклика системы, который зависит от параметров метода кусочного размножения оценок (размер скользящего окна , степень аппроксимирующей функции ).
3. временные и частотные характеристики устройства, реализующего метод кусочного размножения оценок
В общем случае выражение (10) можно рассматривать как уравнение дискретного фильтра. Рассмотрим предлагаемый метод оценивания с точки зрения реализации его в виде дискретного фильтра и получим его системную функцию [3].
В общем виде системная функция линейного стационарного дискретного фильтра представляет собой отношение  -преобразования выходного сигнала к -преобразованию входного сигнала [3, 4]. Сопоставим дискретным сигналам ,
-преобразования выходного сигнала к -преобразованию входного сигнала [3, 4]. Сопоставим дискретным сигналам ,  Ваи импульсной характеристике
Ваи импульсной характеристике  Вадискретного фильтра соответственно их Z-преобразования
Вадискретного фильтра соответственно их Z-преобразования  ,
,  Ваи
Ваи  . Так как выходной сигнал является сверткой входного сигнала с импульсной характеристикой устройства, то можно записать [3, 4]:
. Так как выходной сигнал является сверткой входного сигнала с импульсной характеристикой устройства, то можно записать [3, 4]:
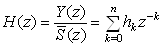 . (16)
. (16)
Таким образом, чтобы определить системную функцию дискретного фильтра (16), необходимо определить его импульсную характеристику, которая является откликом системы на единичное воздействие.
В этом случае функция единичного скачка, подаваемого на вход, описывается выражением [1]:
 ,
,  , (17)
, (17)
где переменная  Ваопределяет положение единичного импульса в исходной выборке, подаваемой на вход.
Ваопределяет положение единичного импульса в исходной выборке, подаваемой на вход.
В случае стационарной системы ее отклик не зависит от Ва[3]. Отметим, что рассматриваемый метод имеет особенности, связанные с тем, что способы оценивания на интервалах исходной выборки ,  Ваи Варазличны. Таким образом, введем начальные условия, которые заключаются в определении отклика системы на интервале .
Ваи Варазличны. Таким образом, введем начальные условия, которые заключаются в определении отклика системы на интервале .
В этом случае функция единичного скачка (17), подаваемого на вход, перепишется в следующем виде:
 ,.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (18)
,.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (18)
Используя выражение (5) и определение исходного сигнала (14), запишем отклик системы, описываемой выражением (6):

 , (19)
, (19)
где индекс Вав  Вапоказывает степень аппроксимирующего полинома.
Вапоказывает степень аппроксимирующего полинома.
Анализ выражения (10) показывает, что отклик системы Ваявляется четной функцией относительно , тогда выражение (19) для интервала  Ваперепишется следующим образом:
Ваперепишется следующим образом:

 . (20)
. (20)
На рис. 8 представлен график функции ,  Вапри различных значениях параметра . Так как пространство аппроксимирующих функций (2) ограничено условием , то представлены графики функции Вапри , Ваи Ва[9]. Зависимости, показанные на рис. 8, получены при фиксированном значении ширины интервала разбиения
Вапри различных значениях параметра . Так как пространство аппроксимирующих функций (2) ограничено условием , то представлены графики функции Вапри , Ваи Ва[9]. Зависимости, показанные на рис. 8, получены при фиксированном значении ширины интервала разбиения  . Анализ результатов, представленных на рис. 8, показывает, что полученные импульсные характеристики фильтра имеют затухающий характер. Отклик системы на единичное воздействие при Ваимеет треугольную форму, с ростом значения , характеристика принимает затухающий характер и колеблется относительно нуля. Число колебаний импульсной характеристики пропорционально параметру . Импульсная характеристика по модулю не превосходит некоторой постоянной величины, что позволяет сделать вывод об устойчивости анализируемого фильтра [3, 4].
. Анализ результатов, представленных на рис. 8, показывает, что полученные импульсные характеристики фильтра имеют затухающий характер. Отклик системы на единичное воздействие при Ваимеет треугольную форму, с ростом значения , характеристика принимает затухающий характер и колеблется относительно нуля. Число колебаний импульсной характеристики пропорционально параметру . Импульсная характеристика по модулю не превосходит некоторой постоянной величины, что позволяет сделать вывод об устойчивости анализируемого фильтра [3, 4].
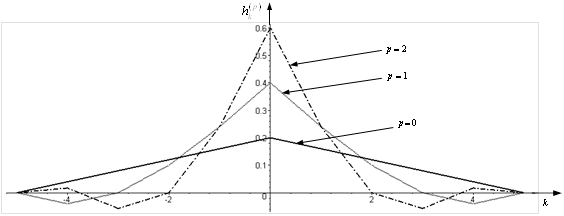
Рис. Импульсная характеристика дискретного фильтра, реализующего метод кусочного размножения оценок при различных степенях аппроксимирующего полинома  Вана каждом интервале разбиения
Вана каждом интервале разбиения
Длина импульсной характеристики определяется параметром Ваи является четной функцией относительно . Таким образом, дискретный фильтр представляет собой КИХ фильтр (дискретный фильтр с конечной импульсной характеристикой) с симметричной импульсной характеристикой [17]. Анализ выражения (20) показывает, что форма импульсной характеристики для каждого Ваопределяется  Ваи пропорциональна ее автокорреляционной функции.
Ваи пропорциональна ее автокорреляционной функции.
В соответствии с выражением (16) системной функцией дискретного фильтра является -преобразование импульсной характеристики Ва[3, 17]. Произведя -преобразование импульсной характеристики (20), получим выражение для системной функции дискретного фильтра  :
:
 Ва(21)
Ва(21)
где индекс Вапоказывает степень аппроксимирующего полинома.
Заменяя в (21)  Вана
Вана  , получим выражение для частотного коэффициента передачи цифрового фильтра
, получим выражение для частотного коэффициента передачи цифрового фильтра  .
.
На рис. 9 представлены результаты расчета модуля частотного коэффициента передачи  Вадискретного фильтра (амплитудно-частотные характеристики тАУ АЧХ), полученные выражением (21).
Вадискретного фильтра (амплитудно-частотные характеристики тАУ АЧХ), полученные выражением (21).
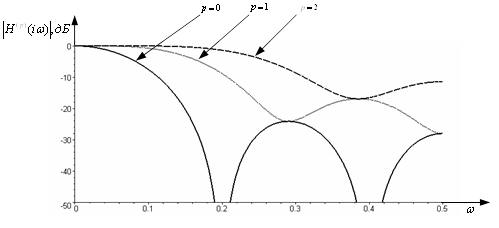
Рис. 9. Амплитудно-частотная характеристика дискретного фильтра, реализующего метод кусочного размножения оценок при длине интервала разбиения Ваи различной фиксированной степени аппроксимирующего полинома Вана каждом интервале
Так как частотная характеристика является периодической функцией частоты с периодом, равным частоте дискретизации, то используется нормировка для проведения сравнений характеристик различных фильтров. Ось частот рис. 9 нормирована относительно  , и вся характеристика находится в интервале
, и вся характеристика находится в интервале  . А так как характеристика симметрична относительно
. А так как характеристика симметрична относительно  , то на рис. 9 и далее рассматривается интервал
, то на рис. 9 и далее рассматривается интервал  Ва[3].
Ва[3].
Анализ результатов, представленных на рис. 9, показывает, что АЧХ дискретного фильтра зависит от степени аппроксимирующего полинома . Максимальный у
Вместе с этим смотрят:
GPS-навигация
IP-телефония. Особенности цифровой офисной связи
РЖсторiя звтАЩязку та його розвиток
Автоматика, телемеханика и связь
Анализ режимов автоматического управления