Трифазний асинхронний двигун типу 4А112М4У3 з коротко замкнутим ротором
Мiнiстерство освiти i науки Украiни
Державний вищий навчальний заклад
Донецький нацiональний технiчний унiверситет
Кафедра Електромеханiки i теоретичних основ електротехнiки
Курсовий проект
Тема: Трифазний асинхронний двигун типу 4А112М4У3 з коротко замкнутим ротором
Донецьк тАУ 2010
Об'iктом розрахунку i конструювання i трифазний асинхронний двигун типу 4А112М4У3 з коротко замкнутим ротором. Вихiдними даними до розрахунку i: номiнальна потужнiсть Рн=5.5 кВт, номiнальна напруга Uн=220/380 В, номiнальний коефiцiiнт потужностi cosjн=0.85, синхронна частота обертання n1=1500 об/хв, частота напруги мережi f=50 Гц, номiнальний коефiцiiнт корисноi дii hн=0.855. Мета роботи: сконструювати i розрахувати асинхронний двигун 4А112М4У3 з короткозамкненим ротором по заданих вихiдних характеристиках, установленим вiдповiдно до вимог державних i галузевих стандартiв. Як базова модель приймаiться асинхронний двигун серii 4А з короткозамкненим ротором. Конструктивне виконання по способу монтажу IM1001. Виконання по ступенi захисту - IP44, категорiя клiматичного виконання - У3, iзоляцiя класу нагрiвостiйкостi В, режим роботи тАУ тривалий. Для даного двигуна застосовуiться сталь марки 2013 вiдповiдно до ДСТ 21427.3-83. Осереддя статора i ротора зiбрано iз штампованих листiв електротехнiчноi сталi товщиною 0.5тАв10-3 м. Обмотка короткозамкненого ротора i закорачивающi кiльця виконуються алюмiнiiвими, обмотка статора тАУ мiдна. При проектуваннi були обранi головнi розмiри (висота осi обертання h=112 мм, зовнiшнiй дiаметр статора Dа=0.191 м, внутрiшнiй дiаметр статора D=0.126 м, розрахункова довжина повiтряного зазору Ld=0.125 м), електромагнiтнi навантаження (А=26*103 А/м, Вd=0.855 Тл).
Перелiк скорочень i умовних позначень
р тАУ число пар полюсiв;
D тАУ внутрiшнiй дiаметр статора;
Da тАУ зовнiшнiй дiаметр статора;
Р' тАУ розрахункова потужнiсть;
m тАУ число фаз;
n1 тАУ синхронна частота обертання;
f тАУ частота живлення;
Z1,2 тАУ число пазiв статора, ротора;
ω тАУ синхронна кутова швидкiсть;
δ тАУ повiтряний зазор;
t - полюсний розподiл;
lд тАУ розрахункова довжина повiтряного зазору;
t1,2 тАУ значення зубцевого розподiлу;
I1н тАУ струм статора при номiнальному навантаженнi;
А тАУ значення лiнiйного навантаження;
Вδ тАУ iндукцiя в повiтряному зазорi;
j1 тАУ щiльнiсть струму в обмотцi статора;
qэф тАУ перетин ефективного провiдника;
hа тАУ висота ярма статора;
Кз тАУ коефiцiiнт заповнення;
D2 тАУ зовнiшнiй дiаметр ротора;
qc тАУ площа поперечного перерiза стрижня;
j2 тАУ щiльнiсть струму в стрижнях ротора;
qкл тАУ площа поперечного перерiза замикаючих кiлець;
Fz1,2 тАУ магнiтнi напруги зубцевих зон статора , ротора;
Kz тАУ коефiцiiнт насичення зубцевих зон;
Lа тАУ довжина середньоi магнiтноi лiнii статора;
K тАУ коефiцiiнт насичення магнiтного ланцюга;
R1 тАУ активний опiр фази обмотки статора;
Кr тАУ коефiцiiнт збiльшення активного опору фази обмотки статора вiд дii ефекту витиснення струму;
а тАУ число рiвнобiжних галузей обмотки;
lср тАУ середня довжина витка обмотки;
Rкл тАУ опiр короткозамикаючого кiльця;
Х1 тАУ iндуктивний опiр обмотки статора;
Х2 - iндуктивний опiр обмотки короткозамкнутого ротора;
Рэ1,2 тАУ електричнi втрати в обмотцi статора, ротора;
Рст тАУ загальнi втрати в сталi статора;
η тАУ коефiцiiнт корисноi дii;
РЖо тАУ струм холостого ходу двигуна;
Qв тАУвитрата повiтря необхiдна для охолодження двигуна;
Вступ
Асинхроннi двигуни одержали найбiльше широке застосування в сучасних електричних установках i i самим розповсюдженим видом безколлекторних електричних двигунiв перемiнного струму. Пояснюiться це простотою конструкцii, надiйнiстю в роботi i задовiльних робочих характеристиках. Областi застосування асинхронних двигунiв, що складають основу сучасного електропривода, досить широкi тАУ вiд привода пристрою автоматики i побутових електроприладiв до привода великого гiрського устаткування. Вiдповiдно до цього потужнiсть асинхронних двигунiв, що випускаються електромашинобудiвною промисловiстю, складаi дiапазон вiд часток ватiв до тисячi кiловатiв при напрузi живильноi мережi вiд десяткiв вольтiв до 10 кiловольтiв. Найбiльше застосування мають трифазнi асинхроннi двигуни серii 4А, розрахованi на роботу вiд мережi промисловоi частоти. Серiя 4А була спроектована в 1969 тАУ 1971 р. i через кiлька рокiв була впроваджена у виробництво. В основу побудови серii покладенi висоти осi обертання ротора (для машин з горизонтальною вiссю обертання) до настановноi поверхнi. Серiя 4А охоплюi дiапазон потужностей вiд 0.06 до 400 квт i виконана на 17 стандартних висотах осi обертання, причому шкала потужностей мiстить 33 ступiнi. Основними виконаннями i закрите, що обдуваiться (4А), i захищене (4АН). Застосування iзоляцii класу нагрiвостiйкостi F i нових сортiв електротехнiчноi сталi дало можливiсть пiдвищити електромагнiтнi навантаження. Це дозволило збiльшити потужнiсть двигунiв при тих же висотах осi обертання, що й у колишнiх серiях, полiпшити iхнi технiко-економiчнi показники. Двигуни виконуються на наступнi номiнальнi напруги:
220/380 В тАУ при потужностях вiд 0.06 до 0.37 кВт, 220/380 i 380/660 В тАУ при потужностях вiд 0.55 до 110 кВт, 380/660 В тАУ при потужностях бiльш 132 кВт. Спроектований двигун може бути застосований для привода механiзмiв з незмiнною частотою обертання: привода вентиляторiв, насосiв, транспортерiв i обробних верстатiв або iнших пристроiв, не потребуючi регулювання частоти обертання приводного двигуна.
1. Вибiр головних розмiрiв
Геометричнi розмiри проектируiмоi машини вибираiмо за лiтературою такi ж як i у двигуна 4А112М4У3.
Число пар полюсiв:
Висота осi обертання:
![]()
Зовнiшнiй дiаметр статора:
![]() Ва/2, стор.164, рис.6-7/
Ва/2, стор.164, рис.6-7/
Внутрiшнiй дiаметр статора:
![]()
![]() /2, стор.165, табл.6-7/
/2, стор.165, табл.6-7/
![]()
Полюсний розподiл:![]()
![]()
Розрахункова потужнiсть:
![]()
де Ке тАУ вiдношення ЭДС обмотки статора до номiнальноi напруги, Ке=0.968 /2, стор. 164, рис.6-8/ cosφ=0,85 η =85.5 /1, стор.28,
табл.2-1/ Електромагнiтне навантаження та iндукцiя в повiтряному зазорi по /2, стор. 166, рис.6-11/:
лiнiйне навантаження:
А=26∙103 А/м
iндукцiя в повiтряному зазорi:
Вd=0.855 Тл
Обмотувальний коефiцiiнт для одношаровоi обмотки (попередньо):
Коб1=0.95 ВаВаВаВаВаВаВаВа
Розрахункова довжина повiтряного зазору:
![]()
де ![]() - кутова швидкiсть вала:
- кутова швидкiсть вала:
![]()
Вiдношення мiж дiаметром D i довжиною повiтрянного зазору ![]() :
:
![]()
Зрiвнявши отримане значення вiдношення мiж дiаметром D i довжиною повiтрянного зазору ![]() Ваз рекомендованим значенням ,яке визначаiться з графiкiв /2, стор. 168, рис.6-14/ можемо зробити висновки що
Ваз рекомендованим значенням ,яке визначаiться з графiкiв /2, стор. 168, рис.6-14/ можемо зробити висновки що ![]() Вазнаходиться в рекомендованому промiжку.
Вазнаходиться в рекомендованому промiжку.
Розмiр повiтряного зазору:
![]()
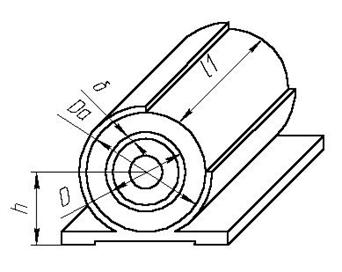
Рисунок 1.1 тАУ Основнi геометричнi розмiри двигуна
2. Розрахунок обмоток статора
Вид обмотки: однослойна концентрична рис. 2.1
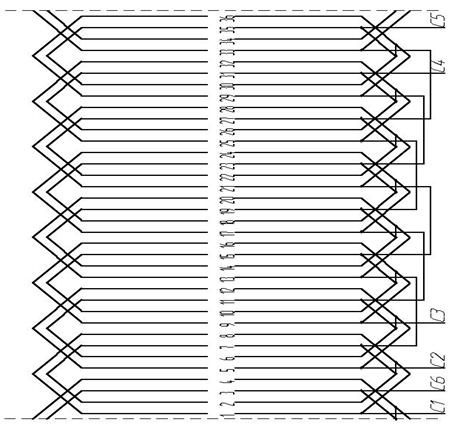
Рисунок 2.1 тАУ Розгортка одношаровоi концентричноi обмотки статора
Число пазiв статора:
![]() Ва/2, стор. 166, рис.6-11/:
Ва/2, стор. 166, рис.6-11/:
![]()
Вибираiмо ![]() шт.
шт.
Число пазiв статора на полюс i фазу:
![]()
де m тАУ число фаз статорноi обмотки. Обмотка одношарова.
Зубцевий розподiл статора:
![]()
Число ефективних провiдникiв у пазу (попередньо, а=1):
![]()
де I1н тАУ струм в обмотцi статора:
![]()
Приймаiмо а=1, число ефективних провiдникiв у пазу:
![]()
Тодi остаточне значення:
- число виткiв обмотки статора:
![]()
- число виткiв обмотки однiii фази:
![]()
- число виткiв паралельноi вiтки фази:
![]()
- число виткiв однiii фази статора:
- значення лiнiйного навантаження:
![]()
- магнiтний потiк:
![]()
де ![]()
![]() Ва/2, стор. 69, рис.3-11/:
Ва/2, стор. 69, рис.3-11/: ![]() Ва/2, стор. 71, табл.3-13/:
Ва/2, стор. 71, табл.3-13/:
Значення А и Вd знаходиться в припустимих межах / 2, стор. 166, рис.6-11 /
РЖндукцiя в повiтряному зазорi:
![]()
Вiдхилення вiд табличного значення не перевищуi 1%
Щiльнiсть струму в обмотцi статора (попередньо):
![]()
де
![]() Ва/ 2., стор. 173, рис. 6-16 /
Ва/ 2., стор. 173, рис. 6-16 /
Перетин ефективного провiдника (попередньо):
![]()
Приймаiмо число елементарних провiдникiв n=1, тодi перетин:
![]()
Тодi обмотувальний провiд / 2, стор. 470, П-28 / приймаiмо ПЭТМ:
![]()
![]()
![]()
Щiльнiсть струму в обмотцi статора (остаточно):

3. Розрахунок розмiрiв зубцевоi зони статора
Тип паза статора, рис.3.1, приймаiмо з лiтератури /1, стор. 182, рис.6-1/

Рисунок 3.1 тАУ Форма та розмiри паза статора
По вибраному значенню iндукцii опридiляiться попередньо висота ярма статора:
![]()
де ![]() Вакоефiцiiнт заповнення сталлю магнiтопровода
Вакоефiцiiнт заповнення сталлю магнiтопровода
![]() / 2, стор. 176, табл. 6-11/
/ 2, стор. 176, табл. 6-11/
![]()
Ширина зубца статора:
![]()
Розмiри паза в штампi:
Глубина паза
![]()
Ширина пазу
![]()
![]()
Де, bш=3.5∙10-3 м
hш=0.5∙10-3 м / 2, стор. 179, табл. 6.12/:
Розмiри паза у свiтлi з урахуванням припускiв на зборку:
![]()
![]()
![]()
де припуски по ширинi паза Db i по висотi Dh приймаiмо 0,1мм / 2, стор. 177/.
Площа поперечного перерiза паза для розмiщення провiдникiв:
![]()
де Sпр тАУ площа поперечного перерiза прокладок
![]() ВаSиз тАУ площа поперечного перерiза корпусноi iзоляцii
ВаSиз тАУ площа поперечного перерiза корпусноi iзоляцii
![]()
де bиз тАУ однобiчна товщина iзоляцii, bиз=0,25∙10-3/2, стор. 61, табл. 3.8/
Коефiцiiнт заповнення паза:
![]()
Кз знаходиться в припустимих межах 0.70-0.75 при ручнiй укладцi обмоток по /2, стор. 66, табл. 3-12/
4. Розрахунок коротко замкнутого ротора
Повiтряний зазор:
δ=0,3∙10-3м /1, стор.202, табл. 6.1/
Число пазiв ротора:
Z2=34 шт. /2, стор.185, табл. 6.15/
Зовнiшнiй дiаметр:
![]()
Довжина ротора та статора:
L2=L1=0. 125 м
Зубцевий розподiл:
![]()
Внутрiшнiй дiаметр ротора дорiвнюi дiаметровi вала, тому що сердечник безпосередньо насаджений на вал:
![]()
де ![]() =0.23/2, стор. 191, табл. 6.16/ Струм у стрижнi ротора:
=0.23/2, стор. 191, табл. 6.16/ Струм у стрижнi ротора:
![]()
де КI тАУ коефiцiiнт враховуючого впливу струму намагнiчування й опори обмоток, КI=0,88 /2, стор. 183, рис. 6-22/
nI тАУ коефiцiiнт приведення струмiв:
![]()
Тип паза ротора, рис.4.1, приймаiмо з лiтератури /1, стор. 183, рис. 6.2/
Площа поперечного перерiзу стрижня /1, (6-69)/:
![]()
де J2 тАУ щiльнiсть струму, приймаiмо J2=3∙106 А/м2 /2, стор. 186/
Паз ротора (рис. 4.1). Для двигуна з h<160 мм по /1, стор. 188, рис. 6‑27, а/ виконуються грушоподiбнi напiвзакритi пази та лита обмотка на роторi.
Для напiвзакритого грушоподiбного паза короткозамкненого ротора при висотi осi обертання h=112÷132 мм:
bШ = 1,5 мм = 0,0015 м
hШ = 0,75 мм = 0,00075 м

Рисунок 4.1 тАУ Форма та розмiри паза ротора
Припустима ширина зубця /2, (6-77)/:
![]()
де ВZ2 тАУ iндукцiя в зубцях, ВZ2=1,8 Тл /2, стор. 174, табл. 6-10/
Розмiри паза /3, с. 20/:
![]()
![]()
де hП2 тАУ повна висота паза, hП2=0,022м /2, рис. 11/
![]()
Приймаiмо:
b1=5,8∙10-3 м
b2=1,8∙10-3 м
h1=21,66∙10-3 м
Повна висота пазу:
Остаточне значення площi перетину стрижня:
![]()
Щiльнiсть струму в стрижнi:
![]()
Струм у замикаючих кiльцях:
![]()
Щiльнiсть струму в замикаючих кiльцях:
![]()
Короткозамикаючi кiльця. Площа поперечного перерiзу /2, (6-73)/:
![]()
Розмiри замикаючих кiлець:
bкл=1.1∙ hп =1.1∙22.3∙10-3 =24.5∙10-3 м
акл=9.8∙10-3 м
Розмiри замикаючих кiлець наведенi на рис.4.2

Рисунок 4.2 тАУ Форма та розмiри замикаючих кiлець короткозамкнутого ротора з литою обмоткою
5. Розрахунок намагничуючого струму
Для визначення намагнiчующого струму проводиться розрахунок магнiтного кола:
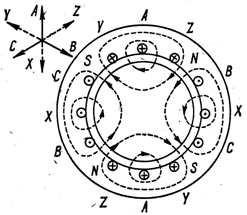
Рисунок 5.1 тАУ Елементарне магнiтне коло асинхронноi машини з 2р=4 Коефiцiiнт повiтряного зазору:
![]()
де γ знаходиться за формулою:
Коефiцiiнт повiтряного зазору вiдносно статора:
![]()
Ширина зубця статора:
![]()
![]()
де bz1тАЩ та bz1тАЭ ширина зверху та знизу зубця статора
![]()
![]()
Ширина зубця ротора:
![]()
![]()
де bz2тАЩ та bz2тАЭ шширина зверху та знизу зубця ротора
![]()
![]()
Значення магнiтноi iндукцii:
- у зубцях статора:
![]()
Що задовiльняi допустимому середньому значенню яке знаходиться в межах
![]()
- у зубцях ротора:
![]()
Що задовiльняi допустимому середньому значенню яке знаходиться в межах ![]()
- у ярмi статора:
![]()
де ![]() - розрахункова висота ярма статора
- розрахункова висота ярма статора
![]()
Що задовiльняi допустимому середньому значенню яке знаходиться в межах ![]()
- у ярмi ротора:
![]()
де ![]() - розрахункова висота ярма ротора
- розрахункова висота ярма ротора
![]()
Що задовiльняi допустимому середньому значенню яке знаходиться в межах ![]()
Магнiтна напруга повiтряного зазору:
![]()
Магнiтна напруга зубцевих зон:
- статора:
![]()
де HZ1=1680A/м при ВZ1=1.832 Тл для сталi 2013 по кривiй намагничування для зубцiв АД/2, стор. 461, П-17/ hz1=h+e=(14.3+0.5)∙10-3=14.8∙10-3 м
- ротора:
![]()
де HZ2=1448 A/м при ВZ2=1.782 Тл для сталi 2013 по кривiй намагничування для зубцiв АД/2, стор. 461, П-17/
![]()
Коефiцiiнт насичення зубцевоi зони:
![]()
Коефiцiiнт насичення лежить у припустимих межах
![]() /2, стор.194/.Магнiтнi напруги:
/2, стор.194/.Магнiтнi напруги:
- ярма статора:
![]() Ваде Ha=632 A/м /2, стор. 460, П-16/ La
Ваде Ha=632 A/м /2, стор. 460, П-16/ La
тАУ довжина середньоi магнiтноi лiнii ярма статора:
![]()
- ярма ротора:
![]()
де HJ=222 A/м /2, стор. 460, табл. П-16/ ВаВаВаВаВаВаВа LJ тАУ довжина середньоi магнiтноi лiнii ярма ротора:
![]()
Сумарна магнiтна напруга
![]()
![]() Коефiцiiнт насичення магнiтного ланцюга:
Коефiцiiнт насичення магнiтного ланцюга:
![]()
Намагнiчуючий струм:
![]()
Вiдносне значення:
![]()
![]() являiться критерiiм правильностi вибору розмiрiв i обмотки двигуна.
являiться критерiiм правильностi вибору розмiрiв i обмотки двигуна.
Так як ![]() Вазнаходиться в рекомендованому промiжку
Вазнаходиться в рекомендованому промiжку ![]() можна зробити висновки що вибiр розмiрiв та обмотки зроблений вiрно i остаточно прийняти для подальших розрахункiв отриманi значення.
можна зробити висновки що вибiр розмiрiв та обмотки зроблений вiрно i остаточно прийняти для подальших розрахункiв отриманi значення.
6. Параметри робочого режиму
Параметри робочого режиму знаходимо для еквiвалентноi заступноi схеми однiii фази двигуна з нерухомим приведеним ротором, яка приведена на рис.6.1
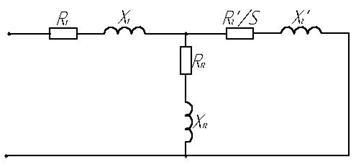
Рисунок 6.1 тАУ Т-образна заступна схема асинхронного двигуна
асинхронний двигун трифазний ротор
Активний опiр фази обмотки статора:
![]()
де Кr тАУ коефiцiiнт збiльшення активного опору фази обмотки вiд дii ефекту витиснення струму, Кr=1
![]() Ва- питомий опiр матерiалу обмотки при розрахунковiй температурi, Vрасч.=1150С, для мiдi
Ва- питомий опiр матерiалу обмотки при розрахунковiй температурi, Vрасч.=1150С, для мiдi ![]() =10-6/41 Ом∙м
=10-6/41 Ом∙м
L1 тАУ довжина провiдника фази обмотки:
![]()
де Lср1 тАУ середня довжина витка обмотки:
![]()
Lп1 тАУ довжина стрижня статора, Lп1=0, 125 м ВаВаВаВаВаВа Lл1 тАУ довжина лобовоi частини секцii
![]()
де ![]() Ва/2, стор.197, табл. 6-19/
Ва/2, стор.197, табл. 6-19/
b тАУ довжина вильоту прямолiнiйноi частини котушок з паза вiд торця сердечника до початку вiдгину лобовоi частини, приймаiмо b=0,01м bкт тАУ середня ширина котушки, визначаiться по дузi окружностi минаючоi по серединах висоти пазiв:
![]()
де b1 - вiдносне укорочення кроку b1=0.809 при ![]() ВаВацiле число.
ВаВацiле число.
Довжина вильоту лобовоi частини котушки:
![]()
де Квыл=0,4 /2, стор.197, табл. 6-19/
Вiдносне значення:
![]()
Що задовiльняi допустимому середньому значенню яке знаходиться в межах ![]()
Активний опiр фази короткозамкнутого ротора:
![]()
![]()
де rc - опiр стрижня:
![]()
де rc тАУ питомий опiр матерiалу стрижня й алюмiнiiвих короткозамикаючих кiлець при t0=1150С, r115=10-6/20,5 Ом∙м
Опiр замикаючих кiлець:
![]()
де Dкл.ср тАУ дiаметр середньоi лiнii замикаючого кiльця:
![]()
Приводимо R2 до числа виткiв обмотки статора:
![]()
Вiдносне значення:

Що задовiльняi допустимому середньому значенню яке знаходиться в межах ![]()
РЖндуктивний опiр фази обмотки статора:
![]()
![]()
де λп1- коефiцiiнт магнiтноi провiдностi пазового розсiювання статора /2, стор. 200, табл. 6.22 /:
![]()

Кb =1та ![]()
- по /2, стор. 200, табл. 6-22/ λл1 - коефiцiiнт магнiтноi провiдностi лобового розсiювання статора:
![]()
λд1 - коефiцiiнт магнiтноi провiдностi диференцiального розсiювання статора:
![]()

Вiдносне значення:
![]()
Що задовiльняi допустимому середньому значенню яке знаходиться в межах ![]()
РЖндуктивний опiр фази обмотки ротора:
![]()
![]()
де λп2- коефiцiiнт магнiтноi провiдностi пазового розсiювання ротора:
λл2 - коефiцiiнт магнiтноi провiдностi лобового розсiювання ротора
![]()
![]()
λд2 - коефiцiiнт магнiтноi провiдностi диференцiального розсiювання ротора
![]()

![]()
Приведемо x2 до числа виткiв статора:
![]()
Вiдносне значення:
![]()
Що задовiльняi допустимому середньому значенню яке знаходиться в межах ![]()
Активний опiр, для врахування втрат в сталi:
![]()
Вiдносне значення:
![]()
РЖндуктивний опiр взаiмноi iндукцii:
![]()
Вiдносне значення:
![]()
Що задовiльняi допустимому середньому значенню яке знаходиться в межах ![]()
7. Втрати та ККД
Електричнi втрати в обмотках статора:
![]()
Електричнi втрати в обмотках ротора:
![]()
Основнi втрати в сталi:
![]()

де Р1,0/50 тАУ питомi втрати в сталi, Р1,0/5,0=2,5 Вт/кг , β=1.5 /2, стор.206, табл. 6-24/ mА тАУ маса стали ярма:

gс тАУ питома маса стали, gз=7,8В·103 кг/м3 /2, стор. 266/ mz - маса зубцiв статора:
![]()
Поверхневi втрати в роторi i статорi:
![]()
![]()
де рПОВ2 i рПОВ1тАУ втрати приходяться на 1м2 поверхнi голiвок зубцiв ротора i статора:




де к01 та к02 тАУ коефiцiiнт для неопрацьованих поверхонь голiвок зубцiв, к01=к02=1,5
Амплiтуда пульсацii iндукцii в повiтряному зазорi над крайками зубцiв ротора i статора:
![]()
![]()
де bО1=0,42 /1, стор. 207, рис. 6-41/ bО2=0,3 /1, стор. 207, рис. 6-41/
Пульсацiйнi втрати в зубцях ротора i статора:


де Впул2 тАУ амплiтуда пульсацii iндукцii в середньому перетинi зубцiв ротора
![]()
Впул1 тАУ амплiтуда пульсацii iндукцii в середньому перетинi зубцiв статора:
![]()
m2 тАУ маса сталi зубцiв ротора:
![]()
Сума додаткових втрат у сталi:
![]()
Повнi втрати в сталi:
![]()
Механiчнi втрати:

![]()
Додатковi втрати при номiнальному режимi:

Повнi втрати в двигунi:
![]()
![]()
Струм холостого ходу двигуна:
![]()
де Iхх,а тАУ активна складового струму

де РЭ1хх тАУ електричнi втрати в статорi при холостому ходi:
![]()
Коефiцiiнт потужностi при холостому ходi:
![]()
Коефiцiiнт корисноi дii двигуна:
![]()
Отриманий коефiцiiнт корисноi дii двигуна перевищуi табличне значення ,яке дорiвнюi ![]() , на 1.9% .
, на 1.9% .
8. Розрахунок робочих характеристик
Для розрахунку робочих характеристик використовуiться уточнена Г‑образна заступна схема. Розрахунок наведений у табл. 8.2. Докладний розрахунок наведений для ковзання S=Sн=0,033, яке визначено методом iнтерполяцii за допомогою MatLab Робочi характеристики спроектованого двигуна наведенi на Рисунку 8.2.

Рисунок 8.1 тАУ Уточнена Г-образна заступна схема асинхронноi машини
Параметри заступноi схеми /2, (6-179), (6-180)/:

Вiдноснi значення параметрiв /2, c. 205/:
![]()
![]()
![]()
|γ| не перевищуi 1, тому реактивною складовою коефiцiiнта можна знехтувати /2, c. 210/, тодi приблизно за /2, (6-218)/:
Активна складового струму синхронного холостого ходу:

Враховуючи значення |γ|, яке не перевищуi 1, можна використати приблизний метод за [1, (6-223)]:
![]() ;
; ![]()
![]() ;
; ![]()
Втрати не змiннi при змiнi ковзання:
![]()
Приймемо попередньо: ![]() ВаПо формулам /2, табл. 6-26/ розрахуiмо робочi характеристики за допомогою MatLab та знайдемо Sн:
ВаПо формулам /2, табл. 6-26/ розрахуiмо робочi характеристики за допомогою MatLab та знайдемо Sн:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Активна складова струму:
![]()
Реактивна складова струму:
![]()
Повний струм:
![]()
Приведений струм ротора:
![]()
Електричнi втрати в статорi:
![]()
Електричнi втрати в роторi:
![]()
![]()
Додатковi втрати:

Сумарнi втрати:
![]()
Номiнальна потужнiсть:
![]()
Коефiцiiнт корисноi дii:
![]()
Таблиця 8.1 тАУ Вхiднi даннi для розрахунку робочих характеристик
| Параметр | Значення | Од. вимiр. | Параметр | Значення | Од. вимiр. | Параметр | Значення | Од. вимiр. |
| P2н | 5500 | Вт | I0a | 0,22 | А | a' | 1,053 | Ом |
| U1н | 220 | В | I0p=Iμ | 3,314 | А | a | 0,91 | Ом |
| I1н | 11,47 | А | r1 | 0,89 | Ом | b' | 0 | Ом |
| 2p | 4 | r2' | 0,697 | Ом | b | 4,194 | Ом | |
| Pст+Pмех | 196,07 | Вт | c1 | 1,026 | Ом | |||
| Pдоб.н. | 32,164 | Вт | ||||||
Таблиця 8.2 тАУ Даннi розрахунку робочих характеристик
Розрахункова величина | Од. вимiр. | Ковзання | ||||||||
| 0,005 | 0,01 | 0,015 | 0,02 | 0,025 | 0,03 | 0,033 | 0,035 | 0,04 | ||
| a' r2'/s | Ом | 109,04 | 54,52 | 36,35 | 27,26 | 21,81 | 20,97 | 21,12 | 15,58 | 13,63 |
| b 'r2'/s | Ом | 0,00 | 0,00 | 0,00 | 0,00 | GPS-навигация IP-телефония. Особенности цифровой офисной связи РЖсторiя звтАЩязку та його розвиток Автоматика, телемеханика и связь Анализ режимов автоматического управления | ||||