Синтез цифрового автомата
дешифратор триггер цифровой автомат
Выпускаемые в настоящее время микросхемы и устройства на их основе не могут охватить весь спектр технических задач. Инженерам и специалистам на различных предприятиях приходится часто решать вопросы, связанные с построением различных устройств, схем и модулей на основе интегральных микросхем. При решении подобных задач необходимо ориентироваться в различных сериях микросхем и знать основные принципы построения устройств на их основе.
Цифровые методы и цифровые устройства, реализованные на интегральных микросхемах разной степени интеграции, имеют широкие перспективы использования в цифровых системах передачи и распределения информации. На базе знаний в этой области основывается изучение сложных цифровых систем. Эти знания необходимы для будущих специалистов по разработке и эксплуатации вычислительной техники, а также различных автоматизированных устройств.
В данной работе рассмотрена задача построения по заданному алгоритму цифрового автомата, то есть некоторого логического устройства, содержащего элементы памяти (в нашем случае тАУ триггеры). Автомат может использоваться для управления какими-либо узлами, для активизации процессов в других модулях. Заранее задан алгоритм работы, и нужно на базе микросхем массового производства построить устройство, функционирующее точно по алгоритму.
1. ОБЩИЕ СВЕДЕНИЯ О ЦИФРОВОМ АВТОМАТЕ
Цифровым автоматом называют дискретный преобразователь информации, способный принимать различные состояния, переходить под воздействием входных сигналов, или команд программы решения задачи, из одного состояния в другое и выдавать выходные сигналы. Автомат называется конечным, если множество его внутренних состояний, а также множества значений входных и выходных сигналов конечны.
Цифровые автоматы могут быть с "жесткой", или схемной, логикой и с логикой, хранимой в памяти. Различают два класса автоматов: асинхронные и синхронные.
Синхронный автомат характеризуется тем, что функционирует под управлением тактовых (или синхронизирующих) сигналов - ТС, с постоянной длительностью t ТС и постоянной частотой f ТС. Период следования сигналов ТС должен быть больше или равен времени, которое необходимо реальному автомату для перехода из одного состояния в другое.
В асинхронных автоматах длительность интервала времени, в течение которого остается неизменным состояние входных сигналов, является величиной переменной и определяется временем, которое необходимо автомату для установки соответствующих выходных сигналов и завершения перехода в новое состояние. Следовательно, асинхронный автомат должен формировать каким-нибудь подходящим способом сигнал о завершении очередного такта, по которому текущие входные сигналы могут быть сняты, после чего может начаться следующий такт, т.е. возможно поступление новых входных сигналов.
Для задания конечного автомата фиксируются три конечных множества:
- множество возможных входных сигналов:
X = {x1, x2, .., xm} (1)
- множество возможных выходных сигналов:
Y = {y1, y2, .., yk} (2)
- множество возможных внутренних состояний автомата:
A = {a0, a1, .., an} (3)
Кроме того, на множестве состояний автомата фиксируют одно из внутренних состояний а0 в качестве начального состояния.
Понятие состояние автомата используется для описания систем, выходные сигналы которых зависят не только от входных сигналов в данный момент времени, но и от некоторой предыстории, т.е. сигналов, которые поступали на входы системы ранее. Следовательно, цифровые автоматы относятся к последовательностным схемам, которые обладают памятью.
В настоящее время в классе синхронных автоматов рассматривают, в основном, два типа автоматов: автомат Мили и автомат Мура.
Закон функционирования автоматов Мили может быть задан следующим образом:
a t+1 = f a t, x t (4)
y t = φa t, x t (5)
где t = 1, 2, ...
аt+1 тАУ новое состояние цифрового автомата;
а t тАУ предыдущее состояние автомата;
y tтАУ выходные сигналы текущего времени;
x t тАУ сигналы на входе в данный момент времени.
Отличительная особенность автоматов Мили состоит в том, что их выходные сигналы в некоторый момент времени зависят как от состояния автомата, так и от значения входного сигнала в этот же момент времени.
Функции переходов и выходов автомата Мура:
a t+1 = f a t, x t (6)
y t = φa t (7)
Последовательность действий автомата по формированию выходных сигналов и сигналов управления триггерами с учетом входных сигналов может быть задана с помощью алгоритма. Алгоритм фактически является форматизированным представлением задачи по построению цифрового устройства, где определены группы входных сигналов для инициализации устройств схемы (например, операционного устройства процессора) в зависимости от поступления тех или иных входных сигналов (x). Задать цифровой автомат удобно с помощью графа. Графом называется непустое конечное множество узлов (вершин) вместе с множеством дуг (ветвей), соединяющих пары различных узлов. Граф обычно представляется в наглядной форме, при этом вершины изображаются точками или кругами, а ветви изображаются линиями, соединяющими соответствующие узлы. Таким образом, графы можно использовать для математического моделирования самых разнообразных систем и структур электрических схем, вычислительных сетей и т.д.
В общем случае структурная схема цифрового автомата может быть представлена в виде трёх основных узлов (рисунок 2).
- память - фиксирует внутреннее состояние цифрового автомата.
- комбинационная схема управления памятью.
- комбинационная схема формирования выходных сигналов.
Сигналы состояния памяти идут на обе комбинационные схемы. В автомате Мура выходные сигналы зависят только от состояния памяти и являются функциями. В автомате Миля выходные сигналы и сигналы управления памятью зависят от состояния памяти и входных сигналов.
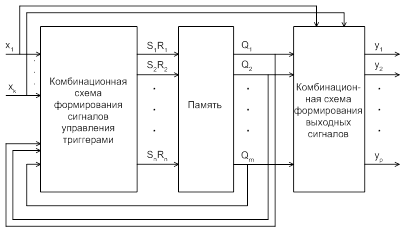
Рисунок 2 - Управляющее устройство со схемной логикой
2. РАiЕТ И ПОСТРОЕНИЕ СХЕМЫ ЦИФРОВОГО АВТОМАТА
2.1 Кодирование состояний
Необходимо выполнить расчет и произвести построение схемы цифрового автомата - устройства, функционирующего по некоторому алгоритму. На вход автомата подаются входные сигналы x1тАжx5, на выходе формируются сигналы для управления некоторым устройством y1тАжy7. В состав такого устройства входят элементы памяти тАУ триггеры. Значение выходных сигналов устройства зависят не только от аргументов на входе, но и от предыдущего состояния автомата, которое фиксируется элементами памяти.
Схема алгоритма функционирования цифрового автомата показана на рисунке 3. По алгоритму устройства с учетом внутренней структуры и возможностей совмещения операций определены внутренние состояния. Место на алгоритме, где автомат фиксирует внутреннее состояние, отмечено крестиком, и проставлено буквенное обозначение с соответствующим индексом. Исходное состояние автомата тАУ a6. Внутренние состояния фиксируют цифровой автомат в виде кодовой комбинации состояния памяти и обеспечивают задержку для выполнения действий в ОУ, подготовку и анализ входных сигналов.
Теперь имеются все три множества величин, необходимых для задания ЦА: множество входных сигналов X, выходных сигналов Y, внутренних состояний A.
Далее нужно закодировать (при помощи кода 8-4-2-1) обозначенные внутренние состояния. То есть каждому внутреннему состоянию присваивается двоичный код. Кодирование состояний представлено в таблице 1.
Таблица 1 - Кодирование состояний цифрового автомата
| Состояние автомата | Q 4 | Q 3 | Q 2 | Q 1 | Двоичный код |
а0 | 0 | 0 | 0 | 0 | 0000 |
а1 | 0 | 0 | 0 | 1 | 0001 |
а2 | 0 | 0 | 1 | 0 | 0010 |
а3 | 0 | 0 | 1 | 1 | 0011 |
а4 | 0 | 1 | 0 | 0 | 0100 |
а5 | 0 | 1 | 0 | 1 | 0101 |
а6 | 0 | 1 | 1 | 0 | 0110 |
а7 | 0 | 1 | 1 | 1 | 0111 |
а8 | 1 | 0 | 0 | 0 | 1000 |
а9 | 1 | 0 | 0 | 1 | 1001 |
а10 | 1 | 0 | 1 | 0 | 1010 |
а11 | 1 | 0 | 1 | 1 | 1011 |
Для построения цифрового автомата будет применяться серия микросхем 561.
Данный ЦА будет строиться на JK-триггерах 561ТВ1. Число триггеров для построения регистра состояний равно разрядности кодовой комбинации состояния. В данном автомате используется четыре триггера. Триггеры по своей структуре являются динамическими, что является важным при построении схем цифровых автоматов. Использование таких триггеров предотвращает явление гонок, которое может привести к неправильной работе автомата.
Для дальнейших расчетов потребуется таблица переходов триггера (таблица 2).
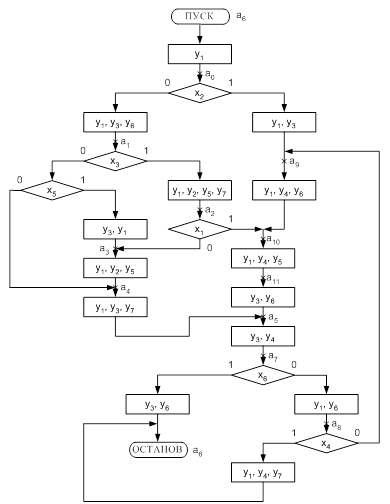
Рисунок 3 - Алгоритм функционирования цифрового автомата
Таблица 2 - Таблица переходов JK-триггера
| Переход | J | K |
| 0 → 0 | 0 | ─ |
| 0 → 1 | 1 | ─ |
| 1 → 0 | ─ | 1 |
| 1 → 1 | ─ | 0 |
2.2 Составление таблицы функционирования комбинационного узла автомата
Таблица функционирования комбинационного узла автомата (таблица 3), заполняется на основе графа, который удобно использовать для задания цифрового автомата.
Состояние устройства в графе будет соответствовать вершинам (узлам) графа, оно обозначено кружком и буквенным обозначением состояния. Узлы соединяются дугами, которые показывают направление перехода. На дугах записаны условия перехода, под действием которых он происходит, и выходные сигналы, которые при этом должны быть сформированы. Значение выходных сигналов y1тАжy7 изменяется только при следующем переключении триггеров (при наступлении следующего активного уровня). Граф представлен на рисунке 4.
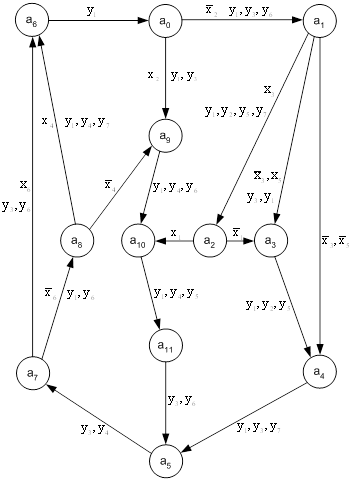
Рисунок 4 - Граф переходов автомата
Граф построен на основе алгоритма и содержит полную информацию о цифровом автомате: число состояний, переходы между состояниями, влияние внешних условий, формируемые при переходе управляющие сигналы.
После построения графа нужно на его основе заполнить таблицу функционирования комбинационного узла автомата (таблица 3).
Столбцы 1, 6, 11-16 и 25-31 заполняются по графу переходов; 2-5, 7-10 тАУ по таблице кодировки состояний; 17-24 тАУ по таблице переходов.
Вместе с этим смотрят:
GPS-навигация
IP-телефония. Особенности цифровой офисной связи
РЖсторiя звтАЩязку та його розвиток
Автоматика, телемеханика и связь
Анализ режимов автоматического управления