(2)=1023
(10),
а при шкале 1 В мы при подаче уже 1 В получаем то же самое число 1023(10).
Минимально различимый уровень при шкале 10 В

а при шкале 1 В :
Вполне понятно, что максимальное напряжение на аналоговом входе не должно превышать шкалу АЦП. В противном случае нарушится однозначное соответствие выходного кода и уровня напряжения входного сигнала.
Источником информации (сигнала) для проектируемого канала сбора аналоговых данных является датчик с симметричным относительно общего провода выходом. Тип датчика не конкретизируется. Это может быть датчик перемещений, датчик температуры, измерительная мостовая схема и т.п.
Но в задании оговорена функциональная зависимость ЭДС датчика от измеряемой величины, и одной из задач РГР является линеаризация характеристики измерительного тракта с целью повышения точности измерений.
Зависимость ЭДС датчика от измеряемой величины (для дневного отделения) для одних вариантов определена аналитическим выражением, для других - графической зависимостью  .
.
Одновременно с полезным дифференциальным сигналом на вход проектируемого устройства попадает синфазная помеха, уровень напряжения которой задан. Эта помеха может иметь различную физическую природу - сетевые наводки, радиопомехи и т.п. Уровень синфазной помехи может значительно превышать уровень полезного сигнала, что требует принятия специальных мер ее подавления.
Исходные данные для проектирования канала сбора аналоговых данных микропроцессорной системы приведены в табл. 2 и на рис.2а - 2г.
Поясним отдельные технические требования к функциональным блокам проектируемого устройства.
Динамический диапазон изменения ЭДС датчика несет информацию о том, в каких пределах изменяется уровень входного сигнала, и выражается в децибелах:
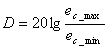
Рисунок 2
Зная максимальную величину  ВаЭДС датчика и значение динамического диапазона, можно определить минимальное значение входного сигнала канала:
ВаЭДС датчика и значение динамического диапазона, можно определить минимальное значение входного сигнала канала:
 ,
,
a затем, разработать технические требования по точностным параметрам аналогового тракта.
Время выборки tвыб определяет интервал времени, в течение которого происходит запоминание аналогового сигнала перед подачей его на вход АЦП.
Период Т следования (колебаний) выходного напряжения генератора в блоке управления устанавливает периодичность временной дискретизации аналогового сигнала и периодичность работы АЦП.
Отсутствие в задании каких-либо сведений о функциональной и принципиальной схемах проектируемого устройства вносит в РГР элементы творчества, способствует получению навыков самостоятельного инженерного поиска. Студент вправе обоснованно выбрать их вариант построения, а также использовать современную элементную базу.
блок схема сбор аналоговая информация
2. ТРЕБОВАНИЯ К РГР
РГР выполняется рукописным или машинным способом на одной стороне листа формата А4 (ГОСТ 9327-60) в соответствии с требованиями ГОСТу
При составлении РГР следует пользоваться методическими указаниями по оформлению текстовых документов курсовых и дипломных проектов.
РГР должна содержать:
1 Титульный лист (приложение).
2 Задание РГР.
3 Оглавление.
4 Введение.
5 Выбор и расчет структурной (функциональной) схемы канала сбора аналоговых данных микропроцессорной системы.
6 Выбор и расчет принципиальных схем всех функциональных блоков проектируемой системы.
7 Заключение.
8 Список использованных источников.
9 Перечень элементов (если он не выполнен на поле схемы электрической принципиальной).
Все рисунки в тексте выполняются аккуратно. Рисунки должны иметь подрисуночные подписи. Буквенно-цифровые обозначения условных графических изображений на рисунках, содержащих схемы, допускается проставлять не по сквозной нумерации. В этом случае необходимо указать номиналы резисторов и конденсаторов, типы транзисторов, диодов и микросхем.
Основные справочные данные активных элементов (транзисторов, диодов, микросхем), применяемых в проектируемом устройстве, должны быть приведены в пояснительной записке, либо по ходу изложения материала, либо в приложении.
При окончательном оформлении РГР пояснительная записка сшивается. Электрические структурная (функциональная) и принципиальные схемы канала сбора аналоговых данных электронной системы в записку не подшиваются, а вкладываются.
3. ПОРЯДОК ЗАЩИТЫ расчетно-графической работы
Защита РГР проводится только после проверки окончательно оформленной пояснительной записки и электрических схем преподавателем. Полностью оформленная работа может быть сдана на проверку не позднее, чем за неделю до защиты.
Допуск к защите заверяется подписью преподавателя.
На защите студенту предоставляется 4¸5 минут для доклада, в котором он в сжатой форме должен осветить основные моменты работы, а именно:
1. Назначение спроектированного устройства и технические требования, предъявленные к нему в задании.
2. Пути решения поставленной задачи, выбор оптимального варианта построения.
3. Состав и принцип действия устройства по его структурной схеме и временным диаграммам, иллюстрирующим ее работу.
4. Реализацию функциональных блоков канала сбора аналоговых данных, особенности схемотехнического решения.
Оценка РГР выставляется с учетом полноты и содержательности ответов при защите, объема и качества проделанной работы, степени самостоятельности, аккуратности оформления, соблюдения ГОСТов и систематичности работы над РГР.
Оценка выставляется на титульном листе, заверяется подписью и заносится в ведомость и зачетную книжку.
4. ВЫБОР И РАiЕТ СТРУКТУРНОЙ СХЕМЫ ПРОЕКТИРУЕМОГО УСТРОЙСТВА
Цель данного раздела РГР - определение необходимого функционального состава проектируемого устройства, установление необходимых связей между функциональными узлами и определение технических требований к каждому из них.
Проектирование начинают с анализа технических требований к входным сигналам оконечного устройства канала сбора аналоговых данных - АЦП. У АЦП имеется аналоговый и управляющий входы, поэтому выбор и обоснование структурной схемы следует разбить на два этапа.
На первом этапе необходимо определить наиболее рациональный состав функциональных узлов, которые участвуют в преобразовании выходного сигнала датчика и стоят между его выходом и аналоговым входом АЦП. Указанную совокупность узлов назовем аналоговым трактом.
На втором этапе следует определить состав и структуру управляющего тракта, т.е. совокупности устройств, включающих генератор и устройства, формирующие требуемые управляющие сигналы для АЦП и аналогового тракта.
4.1 Выбор и расчет структурной схемы аналогового тракта
Проектирование нужно начинать с сопоставления технических характеристик датчика и технических требований к форме и параметрам сигнала на аналоговом входе АЦП.
Ход рассуждений может быть примерно следующий:
АЦП имеет несимметричный аналоговый вход, а датчик - симметричный выход. Отсюда ясно, что в состав аналогового тракта должен входить дифференциальный (разностный) усилитель, подключенный к выходу датчика. Назовем этот усилитель согласующим (СУ).
Наибольшая точность преобразования аналогового сигнала в цифровой код получается, когда используется вся шкала АЦП, т.е. в том случае, когда
 ,
,
гдеВаВаВа  Ва- максимальное значение сигнала на аналоговом входе АЦП.
Ва- максимальное значение сигнала на аналоговом входе АЦП.  - шкала АЦП.
- шкала АЦП.
Максимальная величина ЭДС  Вадатчика намного меньше шкалы , поэтому аналоговый тракт должен обладать коэффициентом усиления не менее чем
Вадатчика намного меньше шкалы , поэтому аналоговый тракт должен обладать коэффициентом усиления не менее чем

где  =(1,1 - 1,3) - коэффициент запаса по усилению.
=(1,1 - 1,3) - коэффициент запаса по усилению.
Из задания на работу известно, что наряду с полезным сигналом действует синфазная помеха. Для исключения ее влияния аналоговый тракт должен иметь коэффициент ослабления синфазного сигнала (КОСС)
 ,
,
гдеВаВаВа  Ва- напряжение синфазной помехи;
Ва- напряжение синфазной помехи;
Ва- минимальное значение ЭДС сигнала датчика;
D- динамический диапазон изменения входного сигнала, дБ.
Устройством, ослабляющим синфазную помеху, может быть усилитель с дифференциальными входами, введение которого в аналоговый тракт продиктовано необходимостью согласования симметричного выхода датчика с аналоговым трактом (см.п.4.1.1).
Зависимость ЭДС датчика от измеряемой величины является нелинейной. В этой связи необходимо включение в состав аналогового тракта функционального преобразователя, обеспечивающего линеаризацию характеристики датчика. Причем данный функциональный преобразователь должен иметь передаточную характеристику, обратную характеристике датчика. Например, если зависимость ЭДС датчика от измеряемой величины (в задании измеряемая величина не конкретизируется; это может быть температура, перемещение, давление и т.п.) описывается выражением:
 ,
,
то функциональный преобразователь должен иметь характеристику вида:
 ,
,
где  Ва- постоянная преобразователя;
Ва- постоянная преобразователя;
 ,
, Ва- входное и выходное напряжения функционального преобразователя. Если зависимость ЭДС датчика от измеряемой величины описывается сложной функцией или задана графически, то вид требуемой передаточной характеристики функционального преобразователя следует определить графическим путем, используя кусочно-линейную аппроксимацию, т.е. аппроксимацию кривой зависимость ЭДС ломаной. ВаЧисло отрезков прямых в рабочем диапазоне достаточно взять 4÷5. Во всех вариантах для определенности рекомендуется крутизну преобразования функционального преобразователя выбрать таким образом, чтобы
Ва- входное и выходное напряжения функционального преобразователя. Если зависимость ЭДС датчика от измеряемой величины описывается сложной функцией или задана графически, то вид требуемой передаточной характеристики функционального преобразователя следует определить графическим путем, используя кусочно-линейную аппроксимацию, т.е. аппроксимацию кривой зависимость ЭДС ломаной. ВаЧисло отрезков прямых в рабочем диапазоне достаточно взять 4÷5. Во всех вариантах для определенности рекомендуется крутизну преобразования функционального преобразователя выбрать таким образом, чтобы
 ,
,
где Ваи
Ваи  Ва- величины максимального входного и выходного напряжений.
Ва- величины максимального входного и выходного напряжений.
Из задания на работу известна полоса частот спектра полезного сигнала. Это дает возможность сформулировать технические требования к фильтру низких частот по полосе пропускания, а именно граничная частота фильтра
ƒфнч = ƒв
где ƒв - верхняя частота спектра сигнала датчика.
В задании на работу не оговорены требования к АЧХ фильтра, поэтому имеются достаточно широкие возможности в выборе типа фильтра низких частот. Однако целесообразно использовать RC-фильтры. Можно применять активные RC - фильтры типа Баттерворта 2-го порядка, а можно достичь фильтрующих свойств аналогового тракта, совместив дифференциальный усилитель и RC -фильтр.
Преимущества применения активных RC - фильтров по сравнению с LС - фильтрами очевидны. Это хорошая равномерность АЧХ в полосе пропускания и хорошая скорость спада на переходном участке: практически полная развязка входных и выходных цепей, малые габариты и т.д.
Если фильтр выполняется в виде отдельного функционального узла, то его необходимо включать обязательно до нелинейного устройства. В противном случае высокочастотные помехи наводки (с ними практически всегда приходится иметь дело) могут быть трансформированы в область спектра полезного сигнала.
Как уже указывалось, в момент преобразования аналогового сигнала в цифровой код напряжение на входе АЦП должно быть неизменно. Следовательно, в состав аналогового тракта должно входить устройство выборки-хранения, которое периодически запоминает с осреднением мгновенное значение выходного сигнала функционального преобразователя и хранит его в течение времени хранения txp (рис.3).
В итоге анализа по пп.4.1.2 - 4.1.6 структурная схема аналогового тракта может быть представлена так, как показано на рис.4, где СУ - согласующий усилитель;
ФНЧ - фильтр нижних частот;
ФП - функциональный преобразователь;
УВХ - устройство выборки-хранения;
АЦП - аналого-цифровой преобразователь.
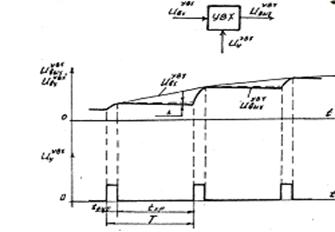
Рисунок 3 - Временные диаграммы работы УВХ
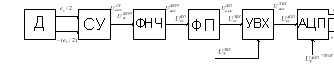
Рисунок 4 - структурная схема аналогового тракта при одном датчике
4.2 Определение технических требований к функциональным блокам аналогового тракта
Для того, чтобы грамотно сформулировать технические требования к блокам проектируемого устройства, необходимо предварительно ознакомиться с их принципом действия и схемотехническими особенностями построения по литературе [2, 3] и конспекту лекций по курсу "Аналоговая схемотехника". В противном случае может оказаться, что будут заданы требования, выполнение которых встретит серьезные трудности.
Расчет технических требований следует производить в обратном порядке прохождения аналогового сигнала, т.е. мысленно перемещаясь от АЦП к датчику информации.
Известны [2, 3] устройства выборки-хранения, принцип действия которых основан на заряде емкости через ключ в течение интервала tв выборки и хранения накопленного значения в течение txp после отключения ключа (см. рис.3). В качестве ключа используют как биполярные, так и полевые транзисторы. Однако ключи на полевых транзисторах обладают лучшими характеристиками, поэтому их применение предпочтительней.
Основными техническими характеристиками УВХ являются:
1. Коэффициент передачи в момент окончания выборки

2.Максимальные значения входного  Ваи выходного
Ваи выходного  Ванапряжений.
Ванапряжений.
3.Входное  Ваи выходное
Ваи выходное  Васопротивления по аналоговому сигналу.
Васопротивления по аналоговому сигналу.
4.Относительные ошибки выборки  Ваи хранения
Ваи хранения 
5.Форма и параметры сигнала на управляющем входе УВХ.
6.Напряжение источников питания УВХ.
Так как существует большая неопределенность выбора указанных параметров УВХ, то их нужно задать, используя практический опыт построения подобных устройств и инженерную интуицию. Это очень ответственный этап проектирования, однако излишним опасениям здесь не место. Следует помнить, что в случае невозможности реализации УВХ с заданными наперед характеристиками, возможен этап коррекции технического задания. Это, собственно, обычный (стандартный) путь решения инженерных и исследовательских задач .
В первую очередь можно задаться
Кувх=1
и найти максимальное значение напряжения входного аналогового сигнала:

Зная, что современные методы построения УВХ дают возможность реализации относительных ошибок  Ваи
Ваи  Вадо 10-4 и ниже, можно установить требования к допустимой погрешности:
Вадо 10-4 и ниже, можно установить требования к допустимой погрешности:
Ориентируясь на выполнение аналогового тракта на операционных усилителях (ОУ), задаются стандартной величиной напряжения источников питания:
ЕИ1 = +15 В;
ЕИ2 = -15 В.
Как известно, в схемах на ОУ достаточно легко реализуются большое входное сопротивление (до единиц мом) и малое выходное сопротивление (менее десятков - сотен ом), поэтому устанавливаем требования:


Длительность импульсов управления и период их следования оговорены в техническом задании на РГР. Подлежит определению величина времени хранения:
tхр = Т тАУ tв
и амплитудные значения импульса и впадины на управляющем входе УВХ.
При реализации управляющего тракта полностью на ОУ рекомендуется выбрать: 
 Вас последующим уточнением этих данных при расчете принципиальных схем.
Вас последующим уточнением этих данных при расчете принципиальных схем.
При реализации блоков оправляющего тракта на транзисторах либо логических элементах можно брать: Ва
Основной характеристикой функционального преобразователя является зависимость выходного напряжения  Ваот входного
Ваот входного  :
:

Если зависимость ЭДС датчика задана аналитическим выражением, например, ec = 0,4 l2, то искомая зависимость определяется как обратная функция

где Кфп - постоянная преобразователя. ВаКфп определяется следующим образом. Из п. 4.2.1- известно, что

В соответствии с выводами п. 4.1.4

Отсюда
 (1)
(1)
и, соответственно,
 Ва(2)
Ва(2)
Постановка выражения (2) в (1) позволяет получить аналитическое выражение передаточной характеристики преобразователя
 (3)
(3)
В зависимости (3) нужно построить график Ва(рис.5), аппроксимировать кривую ломаной и определить графическим путем координаты точек излома 
 ,
,
где j=1, 2, 3, 4, 5, тАжn и требуемые коэффициенты усиления на участках по формуле
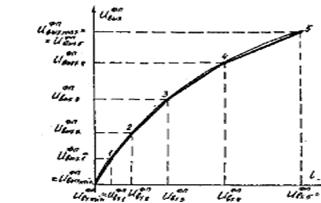
Рисунок 5 - аппроксимация кривой ломаной
При аппроксимации следует учитывать, что минимальное значение входного сигнала определяется как

где D - динамический диапазон, дБ (он оговорен в задании на РГР).
Если зависимость ЭДС датчика от измеряемой величины задана графической зависимостью, то передаточную характеристику функционального преобразователя находят путем построений. Для этого рекомендуется построить на листе миллиметровой бумаги в увеличенном масштабе график ес= f (l) (рис.6), выделить на нем точки I и 5, соответствующие минимальной и максимальной ЭДС датчика и провести через точку 5 и начало координат ось симметрии.
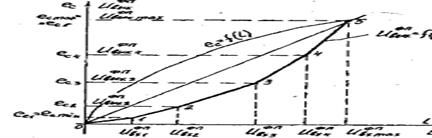
Рисунок 6 тАУ Определение передаточной характеристики функционального преобразователя
Затем необходимо построить симметричную относительно оси кривую, которая и будет искомой передаточной функцией функционального преобразователя.
Выполнив указанные построения, приступают к определению масштабов по осям  Ваи
Ваи  , которые совмещены с осями e и ec.
, которые совмещены с осями e и ec.
Масштабирование основывается на том, что

После нахождения масштабов по осям аппроксимируют зависимость  Ваотрезками, находят координаты точек излома и требуемые коэффициенты усиления, как уже указывалось выше.
Ваотрезками, находят координаты точек излома и требуемые коэффициенты усиления, как уже указывалось выше.
Требования к величине выходного сопротивления  Вафункционального преобразователя устанавливаются входным сопротивлением нагрузки, т.е. входным сопротивлением
Вафункционального преобразователя устанавливаются входным сопротивлением нагрузки, т.е. входным сопротивлением  ВаУВХ:
ВаУВХ:

Входное сопротивление функционального преобразователя можно задать ориентировочно в пределах:
 ,
,
учитывая, что в последующем большие значения  Вапотребу-
Вапотребу-
ют применения ОУ с малым значением входных токов.
Основными характеристиками и параметрами фильтра нижних частот являются:
1.Ва Верхняя граничная частота  .
.
2.Ва Неравномерность АЧХ в полосе пропускания.
3.Ва Скорость спада частотной характеристики на переходном участке АЧХ.
4.Ва Коэффициент передачи  Вапо напряжению в полосе пропускания.
Вапо напряжению в полосе пропускания.
5.Ва Входное  Ваи выходное
Ваи выходное  Васопротивления.
Васопротивления.
6.Ва Напряжение источников питания.
В задании на проектирование не оговорены требования по неравномерности АЧХ и скорости спада, поэтому их выбор дается на* усмотрение разработчика.
При использовании фильтров Баттерворта неравномерность АЧХ в полосе прозрачности задавать не требуется, так как она получается минимальной.
Скорость спада можно выбрать порядка 12 дБ/октаву (40 дБ/дек).
Фильтры Баттерворта, выполненные на ОУ, имеют  = (1,35 ÷ 1,5) [2]. Отсюда можно определить требования к максимальной величине входного напряжения:
= (1,35 ÷ 1,5) [2]. Отсюда можно определить требования к максимальной величине входного напряжения:
Входное и выходное сопротивления выбираются из условия
 Ва= (10-1000) кОм;
Ва= (10-1000) кОм;
 Ва= (0,1-0,01)
Ва= (0,1-0,01)  ;
;
Напряжение источников питания желательно выбрать одинаковым для всех функциональных блоков. Согласующий усилитель является одним из ответственных узлов аналогового тракта. Он выполняет основное усиление сигнала, подавляет синфазную помеху, обеспечивает согласование с датчиком и регулировку выходного напряжения. Согласующий усилитель должен обладать номинальным коэффициентом усиления разностного сигнала не менее чем
Этот коэффициент усиления изменяется в пределах В± 10 дБ:

Коэффициент ослабления синфазной помехи у него должен быть не менее чем:
Входное сопротивление  Ванеобходимо выбрать таким образом, чтобы оно обеспечивало возможность смены датчиков:
Ванеобходимо выбрать таким образом, чтобы оно обеспечивало возможность смены датчиков:
 ,
,
где  Ва- среднее значение выходного сопротивления датчика, Ом;
Ва- среднее значение выходного сопротивления датчика, Ом;  -диапазон изменения выходного сопротивления датчика, Ом; D - динамический диапазон изменения выходного сигнала датчика, дБ. Выходное сопротивление согласующего усилителя:
-диапазон изменения выходного сопротивления датчика, Ом; D - динамический диапазон изменения выходного сигнала датчика, дБ. Выходное сопротивление согласующего усилителя:

Требования к числу источников питания и их выходному напряжению выбираются на общих основаниях.
Выбор и обоснование структурной схемы управляющего тракта.
Задачей управляющего тракта является создание двух синхронизированных с выходным сигналом задающего генератора последовательностей импульсов для управления УВХ и АЦП, Одна часть параметров этих периодических сигналов оговорена в задании на проектирование (длительности импульсов выборки tв и пуска АЦП  , их период следования T) , а другая получена в результате проектирования аналогового тракта (амплитуды импульсов).
, их период следования T) , а другая получена в результате проектирования аналогового тракта (амплитуды импульсов).
В качестве задающего генератора в соответствии с заданием должен использоваться либо генератор синусоидальных колебаний, либо генератор прямоугольных импульсов.
Проанализируем случай с генератором синусоидальных колебаний.
Использовать непосредственно для управления, например УВХ, выходное напряжение генератора нельзя из-за его синусоидальной формы и несоответствия длительности полуволны и длительности импульса управления УВХ,
Импульсы управления УВХ должны иметь прямоугольную форму и требуемую длительность tв, причем tв <0.5T.
Следовательно, необходимо включить в состав управляющего тракта формирователь импульсов выборки (ФИВ), параметры выходного сигнала которого обеспечивали бы работу по управляющему входу УВХ, например заторможенный мультивибратор.
Непосредственный запуск ФИВ осуществить напряжением формы трудно. В этой связи требуется сформировать короткие пусковые импульсы из сигнала задающего генератора. Реализовать это можно при помощи ограничителя (или усилителя-ограничителя) и дифференцирующей RC -цепочки.
В соответствии с техническими требованиями на РГР пуск на АЦП должен происходить спустя время tзад после окончания импульса выборки. Осуществить задержку можно различными способами. Один из них - при помощи заторможенного мультивибратора, генерирующего импульс длительностью, равной требуемой задержке tзад в момент окончания импульса выборки.
И, наконец, в состав управляющего тракта необходимо ввести формирователь импульсов пуска (ФИП) АЦП, запуск которого осуществляется по срезу импульса заторможенного мультивибратора задержки (ЗМЗ).
Структурная схема управляющего тракта приведена на рис.7. Здесь же даны временные диаграммы, поясняющие ее работу.
Расчет технических требований к функциональным узлам управляющего тракта рекомендуется производить по методике, изложенной в разд.4 настоящих методических указаний. При этом следует предварительно проработать вопросы схемной реализации блоков и оценить возможность осуществления предъявляемых требований к формам и параметрам сигналов при исполнении на транзисторах, операционных усилителях либо логических элементах.
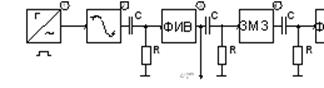
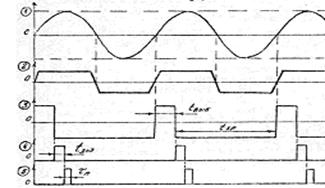
Рисунок 7 тАУ Структурная схема управляющего тракта
5. ВЫБОР И РАiЕТ ПРИНЦИПИАЛЬНЫХ СХЕМ ОСНОВНЫХ БЛОКОВ КАНАЛА СБОРА АНАЛОГОВЫХ ДАННЫХ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ
Прежде чем приступить к составлению принципиальных схем проектируемых узлов, необходимо ознакомиться по литературе [2;3] и конспекту лекций по курсу "Аналоговая схемотехника" с принципом действия схем аналогичного назначения, понять особенности их работы, выявить достоинства и недостатки тех либо иных схемотехнических решений.
Затем уже можно вплотную приступить к решению поставленной задачи, учитывая следующие критерии выбора:
1. Возможность достижения технических характеристик, предъявляемых к проектируемым узлам.
2. Простота в настройке и эксплуатации.
3. Минимальное число источников питания.
4. Минимальные габариты, вес.
5. Высокая надежность.
Все принятые технические решения должны быть логически обоснованы.
5.1 Согласующий усилитель
Одна из возможных схем согласующего усилителя приведена на рис.8.
Здесь цепи коррекции смещения нуля и цепи частной коррекции условно не показаны.
Расчет следует начать с выбора типа ОУ в зависимости от минимального уровня сигналов датчика и его выходного сопротивления, величины напряжения синфазной помехи. В большинстве вариантов для согласующего усилителя подходят ОУ общего применения (140УД7, 140УД8, 153УД2 и др.).
Критерием выбора является возможность удовлетворения следующей системы неравенств:
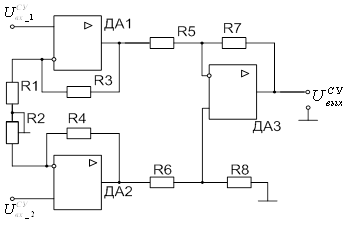
Рисунок 8 тАУ Схема согласующего усилителя
1)Ва 
2)Ва 
3)Ва 
4)Ва 
где  Ва- коэффициент ослабления синфазного сигнала ОУ;
Ва- коэффициент ослабления синфазного сигнала ОУ;
 Ва- дрейф напряжения смещения нуля ОУ;
Ва- дрейф напряжения смещения нуля ОУ;
 Ва- рабочий диапазон температур;
Ва- рабочий диапазон температур;
 Ва- дифференциальный коэффициент усиления ОУ;
Ва- дифференциальный коэффициент усиления ОУ;
 Ва- дифференциальное входное сопротивление ОУ;
Ва- дифференциальное входное сопротивление ОУ;
 Ва- выходное дифференциальное сопротивление датчика
Ва- выходное дифференциальное сопротивление датчика
Для достижения наибольшего ослабления синфазной помехи коэффициент усиления первой ступени усиления на ДА1, ДА2 желательно брать наибольшим (т.е. реализовать на ней основное усиление сигнала), а коэффициент усиления разностного усилителя на ОУ ДА3 принять равным единице. В этом случае резисторы R5÷ R8 получаются одного номинала, а следовательно, облегчается их подбор по требуемому допуску и температурному коэффициенту.
Расчет элементов схемы начинают с каскада на ДА3.
Задаются номиналами резисторов в пределах
![]() Вместе с этим смотрят:
Вместе с этим смотрят:
IP-телефония. Особенности цифровой офисной связи
РЖсторiя звтАЩязку та його розвиток
Автоматика, телемеханика и связь
Анализ режимов автоматического управления
Аргоновый лазер