Высокомоментные двигатели
Электрические моментные двигатели постоянного тока широко используются в качестве исполнительных элементов в современных системах автоматики, телемеханики, измерительной техники.
Теория, разработка и применение этих двигателей в последние годы получили значительное развитие.
Разработчики различных систем управления при выборе исполнительного двигателя сталкиваются с рядом задач. Это тАУопределение целесообразности применения моментных двигателей, которые наряду с крупными достоинствами нередко имеют значительно большие энергопотребление и массу, чем быстроходные двигатели с редуктором. Кроме того, это выбор структуры и значений параметров системы управления приусловии сравнительно большой электромеханической постоянной времени. При проектировании моментных двигателей для конкретной системы необходимо выбирать технические данные на его разработку по известным характеристикам нагрузки и входного воздействия, а также, исходя из требований к системе, выбирать конструкцию двигателя, выполнять необходимые расчеты.
Целью настоящего проекта является разработка универсального лабораторного стенда для исследования высокомоментного двигателя.
1 ОСНОВНЫЕ ПОЛОЖЕНИЯ
Моментным двигателем (МД) называется электромеханический преобразователь, на вход которого подается электрический сигнал постоянного или переменного тока, а выходом является электромагнитный момент, при котором в рабочем режиме ротор либо неподвижен, либо вращается с весьма малой скоростью.

Рисунок 1
1.1 Область применения МД
1.1.1 В коррекционных устройствах гидросистем (для компенсации возмущающих моментов, вызывающих прецессию оси гироскопа).
1.1.2 В стабилизирующих устройствах (система управления положением разных более крупных объектов: антенна, прицел и т.п.).
1.1.3 В устройствах силовой компенсации (в системах с отрицательными о.с.).
1.1.4 Используются в качестве электрических пружин.
1.1.5 Используют в качестве натяжных устройств, чтобы регулировать или сохранять неизменной силу натяжения провода, ленты, цепи и т.п.
1.1.6 В качестве поворотных электромагнитов управляющих заслонками, клапанами, тормозными устройствами и т.п.
1.1.7 В тиристорных, транзисторных электроприводах (далее ЭП) и в приводах подач металлорежущих станков.
1.2 Основные требования к МДПМ
1.2.1 Заданный диапазон углов поворота ротора[1]
.
1.2.2 Заданная зависимость момента от положения ротора1
.
1.2.3 Заданная зависимость момента от сигнала, подаваемого в ОУ. В большинстве случаев эта зависимость линейная.
1.2.5 Отношение , что особенно важно при маломощных источниках питания. С увеличением Mэм и размеров МДПМ потребляемая мощность на единицу момента обычно уменьшается.
, что особенно важно при маломощных источниках питания. С увеличением Mэм и размеров МДПМ потребляемая мощность на единицу момента обычно уменьшается.
1.2.6 При отсутствии тока в ОУ, остаточный момент должен быть весьма мал (вообще отсутствовать).
1.2.7 Tэм, Tэ должны быть как можно меньше. Большие постоянные времени снижают быстродействие и могут привести к неустойчивости следящей системы.
1.2.8 Чувствительность, определяемая наименьшей мощностью сигнала, на которую система начинает реагировать, должна быть высокой.
1.2.9 Масса и габариты Во min.
1.2.10 Устойчивость по отношению к внешним воздействиям (температура, вибрация, удары, давление, влажность, ускорение, радиация и т.п.).
1.3 Достоинства высокомоментного двигателя
1.3.1 Благодаря отсутствию обмотки возбуждения (ОВ) и потерь в этих обмотках машины с постоянными магнитами имеют по сравнению с машинами электромагнитного возбуждения более высокий КПД, облегченные условия охлаждения.
1.3.2 Малые габариты и масса.
1.3.3 Более стабильное возбуждение (поток постоянных магнитов не зависит ни от частоты вращения ни от напряжения ни от температуры).
1.3.4 Простота конструктивного исполнения, когда магнитная система представляет собой намагниченное определенным образом кольцо из магнитотвердого материала.
1.3.5 Наличие постоянных магнитов (ПМ) обеспечивает высокие значения углового ускорения в переходных режимах работы.
1.3.6 Наличие ПМ обеспечивает равномерный ход при малых частотах вращения.
1.3.7 Наличие ПМ обеспечивает способность выдерживать большую перегрузку по току без размагничивания магнитной системы.
1.4 Недостатки высокомоментного двигателя
1.4.1 Напряжение генераторов и частоту вращения двигателей невозможно регулировать изменением поля возбуждения.
1.4.2 При мощности более десятков ватт они уступают по габаритным размерам, массе и стоимости машинам электромагнитного возбуждения.
1.4.3 Материалы, входящие в состав сплавов для ПМ дефицитны.
1.4.4 Технология изготовления и намагничивания ПМ отличается большой сложностью.
1.4.5 Существенное размагничивающее действие МДС якоря.
1.4.6 Запрещается в МДПМ вытаскивать ротор без замены его на какое-нибудь металлическое тело таких же размеров.
1.5 Конструктивные разновидности высокомоментного двиателя
Следует отметить, что у некоторых МД с неограниченным углом поворота ротора частота вращения в установившемся режиме может оказаться довольно значительной (в таких случаях нельзя провести четкую грань между МД и тихоходным двигателем). Однако если этот МД используется в следящей системе, и он, работая в режиме частых пусков и реверсов, в основном вращается с малой частотой; следовательно, и в этом случае также можно считать, что энергия, подводимая из сети, почти полностью выделяется в виде тепла в обмотках. МД постоянного тока широко применяются в качестве исполнительных элементов в современных системах автоматики, телемеханики, измерительной техники. Эти двигатели используются в гироскопах и акселерометрах, в приводах антенн, телескопов, фотоаппаратов, солнечных и звездных датчиков, роботов и манипуляторов; в автоматических построителях графиков; в качестве силовых компенсаторов в измерительных системах; в качестве элементов электрогидравлических и электропневматических приводов; в качестве электрических пружин поворотных электромагнитов и т. д. .
Если МД работает в режиме слежения, то его роль аналогична роли быстроходного исполнительного двигателя в сочетании с редуктором. Однако МД, нередко обладая большими, чем у редукторного привода, энергопотреблением, массой и электромеханической постоянной времени, имеет по сравнению с редукторным приводом весьма существенные преимущества. К ним относятся высокая разрешающая способность МД вследствие отсутствия неизбежных в редукторе МД постоянного тока широко применяются в качестве исполнительных элементов в современных системах автоматики, телемеханики, измерительной техники. Эти двигатели используются в гироскопах и акселерометрах, в приводах антенн, телескопов, фотоаппаратов, солнечных и звездных датчиков, роботов и манипуляторов; в автоматических построителях графиков; в качестве силовых компенсаторов в измерительных системах; в качестве элементов электрогидравлических и электропневматических приводов; в качестве электрических пружин поворотных электромагнитов и т. д. .
Если МД работает в режиме слежения, то его роль аналогична роли быстроходного исполнительного двигателя в сочетании с редуктором. Однако МД, нередко обладая большими, чем у редукторного привода, энергопотреблением, массой и электромеханической постоянной времени, имеет по сравнению с редукторным приводом весьма существенные преимущества. К ним относятся высокая разрешающая способность МД вследствие отсутствия неизбежных в редукторе люфтов и трений, стабильность механических свойств при изменении условии окружающей среды, высокая резонансная частота, возможность установки на одном валу и в общем корпусе с исполнительным механизмом, простота конструкции, более высокая надежность.
МД выпускаются на моменты от нескольких десятитысячных до нескольких тысяч ньютон-метров при потребляемой мощности от долей ватт до десятков киловатт, массе до сотен килограммов, длине до 0,3 м и выше и диаметре до 1,2 м.
Качество МД тем выше, чем больше отношения момента, развиваемого МД, к объему, массе, потребляемой мощности, мощности управления, чем меньше электромагнитная и электромеханическая постоянные времени, а также чем меньше остаточный момент (момент трогания) при нулевом сигнале, возникающий в МД вследствие трения, гистерезиса, неравномерности воздушного зазора, неоднородности магнитных материалов и несбалансированности ротора.
МД могут классифицироваться по их назначению, принципу действия, роду тока, а также по конструктивному выполнению: одноименнополюсные или разноименнополюсные, с радиальным воздушным зазором или торцевые, с неподвижной (барабанной, кольцевой) или подвижной обмоткой, с зубцовопазовой зоной или беспазовые (с гладким якорем), коллекторные или вентильные, с ограниВнченным или неограниченным углом поворота и т. д. .
Ниже приведены классификация МД в зависимости от их назначения и краткие сведения об областях их применения.
В гироскопах, акселерометрах и в других устройствах широко применяются коррекционные МД. В указанных устройствах, находящихся, например, на борту летательного аппарата (ЛА), ось ротора гироскопа под влиянием механических сопротивлений, изменения в процессе полета географических координат положения летательного аппарата и из-за вращения Земли может изменить свое положение относительно заданного. Задача коррекционного МД заключается в том, чтобы компенсировать соответствующие моменты, вызывая прецессию оси гироскопа, или создать прецессию оси, обеспечивающую неизменность положения оси гироскопа относительно неподвижной системы координат. Момент коррекционных МД невелик и обычно составляет от нескольких десятитысячных до нескольких тысячных, а иногда до нескольких сотых ньютон-метра. Для уменьшения компонента остаточного момента, вызванного гистерезисом, коррекционные МД постоянного тока с электромагнитным возбуждением в некоторых гироскопических системах снабжаются размагничивающими обмотками переменного тока.
В многочисленных системах управления положением различных более крупных объектов (антенны, телескопа, фотоаппарата, солнечного или звездного датчика, роботов, манипуляторов и т. д.) применяются стабилизирующие МД, развивающие значительно большие моменты. При отклонении объекта от заданного положения МД создает момент, воздействующий на какую-либо ось или платформу н возвращающий объект в нужное положение. Иногда такие МД одновременно выполняют функции поворотных элементов при переводе объекта из одного углового положения в другое.
Нередко МД используются в качестве силовых компенсаторов в измерительных системах с отрицательной обратной связью. Так, в некоторых манометрах изменение положения мембраны под влиянием повышения или понижения контролируемого давления преобразуется в электрический сигнал, который после усиления подается в обмотку управления (ОУ). При этом в МД возникает момент, удерживающий мембрану в нейтральном положении. По величине тока подаваемого в ОУ, можно судить о значении контролируемого давления.
В некоторых системах измерения и автоматики МД используются в качестве электрических пружин, заменяя собой механические. Нередко МД применяются в качестве натяжных устройств, позволяющих регулировать или сохранять неизменной силу натяжения ленты, пленки и т. д. Некоторые МД используются в автоматических построителях графиков.
МД широко применяются в различных пневмо- и гидросистемах, где oни обычно работают в пропорциональном режиме (на ротор МД помимо электромагнитной силы влияет противодействующая сила, создаваемая механической пружиной или электромагнитным способом, так что каждому значению сигнала, подаваемого в ОУ, соответствует определенное положение ротора).
Нередко МД используются в качестве поворотных (или линейных) электромагнитов, управляющих различными кранами, защелками и т. д. При подаче сигнала в ОУ такие МД обычно осуществляют перемещения, строго зафиксированные по значению.
Наконец, к МД относятся электромеханические узлы многих измерительных, оптических и других приборов, у которых момент, развиваемый двигателем, уравновешивается механической пружиной, а выходом прибора является угол поворота, зависящий от сигнала, подаваемого в ОУ.
В зависимости от принципа действия МД могут выполняться как момент двигатели с постоянными магнитами (магнитоэлектрические), как реактивные (с электромагнитным или комбинированным возбуждением) и как электродинамические. Принцип работы моментного двигателя с постоянными магнитами (МДПМ) основан на взаимодействии между током в ОУ и полем постоянного магнита (ПМ). Существенным достоинством МДПМ является сравнительно малое потребление мощности на единицу момента, так как основной магнитный поток этого двигателя обеспечивается с помощью ПМ. Зависимость электромагнитного момента МДПМ от сигнала, подаваемого в ОУ, близка к линейной. Обмотка управления МДПМ питается постоянным током; при изменении полярности питающего напряжения меняется знак момента. МДПМ без магнитно-мягких полюсных наконечников постоянных магнитов обладает малой электромагнитной постоянной времени, так как поток ОУ должен проходить через зоны большого магнитного сопротивления; в целях уменьшения электромагнитной постоянной времени (а также зубцовой пульсации момента) используют гладкий статор с беспазовой активной зоной. К недостаткам МДПМ следует отнести некоторую сложность конструкции.
Электромагнитный МД имеет явнополюсный ротор, выполненный из магнитно-мягкого материала, и по принципу действия является реактивным. При подаче тока в ОУ такого электродвигателя ротор начинает поворачиваться в сторону максимальной проводимости магнитному потоку. Принцип действия электромагнитного МД налагает ограничения на значение углового смещения ротора относительно статора, хотя при соответствующем конструктивном исполнении оно может достигать 150 градусов. Потребление мощности на единицу момента такого МД обычно больше, чем у МДПМ (за исключением электромагнитов с весьма малым углом поворота ротора). Конструктивно электромагнитный МД достаточно прост, однако обеспечить линейную зависимость его момента от сигнала, подаваемого в ОУ, невозможно. Нельзя осуществить и строгое постоянство момента по углу поворота ротора. Индуктивность ОУ велика, вследствие чего велика и электромагнитная постоянная времени. Знак момента не зависит от направления тока в ОУ, поэтому МД нередко нуждается в возвратной пружине или в сдвоенной конструкции. Питание ОУ может выполняться как постоянным, так н переменным током.
У поляризованного МД поток в зонах взаимодействия статора и ротора создается совместно с ПМ и ОУ. Явнополюсный ротор выполняется магнитно-мягким или же содержит ПМ. В одних воздушных зазорах моментных двигателей МДС ПМ и ОУ, а следовательно, и соответствующие индукции направлены согласно, а в другихтАФвстречно; в результате возникает реактивный вращающий момент, направленный в сторону уменьшения магнитного сопротивления тех воздушных зазоров, в которых индукции складываются. Питание ОУ осуществляется постоянным током: для реверсирования МД надо изменить направление тока в ОУ. Диапазон углов поворота ротора обычно составляет несколько градусов. При небольших отклонениях ротора от среднего положения момент пропорционален току ОУ и мало зависит от угла поворота ротора. Так как основная доля в суммарном потоке такого МД приходится на поток постоянного магнита, потребляемая мощность на единицу момента, а также электромагнитная постоянная времени значительно меньше, чем у электромагнитного МД.
Принцип действия электродинамических МД основан на взаимодействии двух обмоток с током, при этом если хотя бы одна из обмоток размещена на сердечнике из магнитно-мягкого материала, то МД называют ферродинамическими. Эти МД отличаются сравнительно большим потреблением мощности на единицу момента. Обмотки таких МД могут питаться как постоянным, так и переменным током. Зависимость момента от тока ОУ линейна. Для изменения знака момента МД, питаемого постоянным током, надо изменить полярность напряжения, подаваемого на ОУ, а момента МД, питаемого переменным током, тАФ фазу этого напряжения.
Наибольшее распространение среди МД постоянного тока получили МДПМ.
МДПМ с ограниченным углом поворота ротора характеризуется тем, что ось МДС обмотки управления при различных положениях ротора меняет свое положение по отношению к оси ПМ.
Конструктивно МДПМ могут выполняться как нормального (ОУ размещается под индуктором), так и обращенного исполнения, при этом ОУ может находиться как на роторе, так и на статоре. Зависимость электромагнитного момента от сигнала, подаваемого в ОУ, достаточно близка к линейной. За счет полюсных наконечников или геометрии воздушного зазора можно в случае необходимости получить требуемую закономерность изменения момента по углу поворота ротора. В частности, можно добиться практической независимости момента от положения ротора при данном сигнале в ОУ. При разнополярном симметричном потоке в воздушном зазоре в МДПМ с р парами полюсов и условии независимости момента от положения ротора диапазон углов поворота ротора не может превышать 360В°/2p (практически при р=1 не более 120тАФ 130 градусов). При однополярном потоке соответствующий диапазон углов может достигать 260тАФ270 градусов. Если угол поворота ротора не превышает нескольких градусов, то МДПМ может быть выполнен по типу обычного двигателя постоянного тока, но с питанием якорной обмотки через гибкие токопроводы.
МДПМ с неограниченным углом поворота ротора характеризуется тем, что ось МДС обмотки управления при различных положениях ротора сохраняет
почти неизменное положение по отношению к оси ПМ за счет коммутации токов в секциях ОУ. Момент линейно зависит от сигнала в ОУ и почти не зависит от положения ротора.
Примером МДПМ с неограниченным углом поворота ротора может служить многополюсная магнитоэлектрическая коллекторная машина с обмоткой якоря волнового типа. Недостатки коллекторных электродвигателей, которые, как правило, связывают с малой надежностью щеточно-коллекторного узла и радиопомехами, вызываемыми искрением из-под щеток при коммутации секций, в отношении коллекторных МДПМ, работающих в заторможенном режиме, не так явно выражены. Применение волновой обмотки позволяет установить любое (вплоть до р) число пар щеток, что обеспечивает достаточно высокую надежность МД даже при значительных вибрациях и тряске. Естественная многофазность коллекторных МДПМ делает их самыми точными (с точки зрения угловой стабильности момента) среди моментных приводов на постоянном токе.
В тех случаях, когда по условиям эксплуатации применение коллекторных МДПМ недопустимо, находят широкое применение вентильные МД, секции которых подключаются к сети с помощью полупроводниковых ключей (вентилей). Указанные электродвигатели имеют, как правило, обращенное исполнение с размещснием индуктора на роторе. Коммутация токов в секциях ОУ вентильных МДПМ может осуществляться как дискретно, так и непрерывно. Дискретная МДПМ может осуществляться как дискретно, так и непрерывно. Дискретная коммутация осуществляется с помощью датчиков положения ротора (датчиков Холла, трансформаторных, индукционных и др.), управляющих полупроводниковыми ключами, которые подключают к сети постоянного тока трех- или четырехфазную статорную обмотку. Однако у таких МД имеют место значительные пульсации момента по углу поворота ротора (достигающие 10тАФ15 %), вызываемые как коммутационными процессами при переключении фаз, так и дискретными ми поворотами МДС статора. При увеличении количества тактов за один оборот ротора пульсации момента уменьшаются, однако возрастает число датчиков положения или усложняется схема. Непрерывная коммутация осуществляется с помощью синусно-косинусных вращающихся трансформаторов (СКВТ), управляющих токами ОУ МДПМ через фазочувствительные усилители-преобразователи (ФЧУП). В некоторых случаях для непрерывной коммутации используются датчики Холла или емкостные датчики.
Ротором МДПМ с ограниченным или неограниченным углом поворота может быть сама ОУ, размещенная на каркасе из немагнитного материала; в этом случае электромеханическая, а также электромагнитная постоянные времени МДПМ весьма малы, а момент, обусловленный гистерезисом или неравномерностью воздушного зазора, отсутствует. При этом в связи с большим воздушным зазором уменьшается индукция в зазоре и возрастает поток рассеяния.
1.6 Математическое описание ВМД в электромеханических системах
1.7 Принцип действия ВМД
Источником поля возбуждения в ВМД ПТ (МДПМ) является постоянный магнит. На обмотку статора (ротора) подводят постоянное напряжение.
Ток, протекающий в обмотке двигателя, взаимодействуя с магнитным полем постоянного магнита, создает вращающий момент. Когда Mэ>Mс двигатель начнет вращаться.
1.8 НАГРЕВ ДПТ.
При работе двигателя из-за потерь повышается его внутренняя температура. После запуска ЭД и приложения к нему постоянной нагрузки его температура возрастает по закону, близкому к экспоненциальному и достигает установившегося значения, как это показано на рисунке 1.8.1 .
Время, за которое температура достигает 63 процента от своего максимального значения называется тепловой постоянной времени.
Превышение температуры DТ определяется разностью между Тдв и Тохл.ср.:
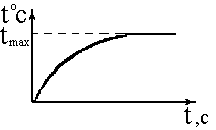
Рисунок 1.8.1 - График роста температуры во время работы электродвигателя.
При значительном увеличении температуры ЭД происходит ускоренное старение его изоляции, а также могут выйти из строя подшипники и коллектор. Предельное DТ определяется классом изоляции двигателя согласно таблице 1.8.1 .
Свойства изоляции ухудшаются по трем основным причинам:
тАУ За счет нагрева.
Связь между температурой и сроком службы изолятора апроксимируется следующими выражениями:
 ,
,
где L тАУ срок службы, лет;
Q тАУ температура изоляции, В°С
а,m тАУ константы, зависящие от материала.
тАУ За счет нагрева.
Коэффициент поверхностного сопротивления уменьшается, а утечка тока увеличивается, когда поверхность электроизоляционного материала впитывает воду. При впитывании воды диэлектриком, уменьшается коэффициент его объемного сопротивления, а потери увеличиваются. Высокая влажность вызывает также химическую деформацию материала из-за растяжения, разбухания и роста плесени, что в свою очередь, способствует дальнейшему ухудшению свойств изоляции.
Таблица 1.8.1 тАУ Классы изоляции
| Класс изоляции | DТ,В°С | Предельно допустимая температура, В°С | Материал изоляции |
| A | 50-60 | 105 | Хлопок, шелк, бумага, поливинил |
| E | 65-75 | 120 | Эмалевая или полистирольная пленка |
| B | 70-80 | 130 | Слюда, стекловолокно с соответствующим клеем |
| F | 85-100 | 155 | Стекловолокно и др. с температурно-резистивным клеем |
| H | 105-125 | 180 | Стекловолокно и др. с кремниевой смолой или с хорошо клеящимся материалом |
| C | - | свыше 180 | Керамические материалы |
Вместе с этим смотрят:
11-этажный жилой дом с мансардой
14-этажный 84-квартирный жилой дом
16-этажный жилой дом с монолитным каркасом в г. Краснодаре
180-квартирный жилой дом в г. Тихорецке
2-этажный 3-секционный 18-квартирный жилой дом в г. Мирном