Системы, эквивалентные системам с известным типом точек покоя
В курсовой работе рассматривается вложимая система с изаестным типом точек покоя. Как известно система является вложимой, если любая компонента этой системы вложима, т.е. система вложима тогда и только тогда, когда множество её решений является подмножеством множества решений некоторой линейной стационарной системы.
В 1тАУ2 м пунктах рассматривается вложимая система, с известным типом точек покоя. Далее проверяем являются ли x и y общим решением нашей системы уравнений.
Во 3-м мы находим первый интеграл системы и проверяем выполнение тождества.
В 4-м пункте применяем теорему об эквивалентности дифференциальных систем.
1. Определение вложимой системы. Условия вложимости
Рассмотрим дифференциальную систему

 D. (1)
D. (1)
Будем называть i-ю компоненту x системы (1) вложимой, если для любого решения x(t)=(x
системы (1) вложимой, если для любого решения x(t)=(x (t),тАж, x
(t),тАж, x (t)), t
(t)), t , этой системы функция x
, этой системы функция x t, является квазимногочленом. Таким образом i-я компонента системы (1) вложима тогда и только тогда, когда для каждого решения x(t) этой системы существует линейное стационарное уравнение вида
t, является квазимногочленом. Таким образом i-я компонента системы (1) вложима тогда и только тогда, когда для каждого решения x(t) этой системы существует линейное стационарное уравнение вида


 , (2)
, (2)
для которого является решением.
является решением.
Вообще говоря, порядок и коэффициенты уравнения (2) зависят от выбора решения  . В частном случае, когда компонента
. В частном случае, когда компонента  любого решения системы (1) является одновременно и решением некоторого, общего для всех решений уравнения (2), компоненту
любого решения системы (1) является одновременно и решением некоторого, общего для всех решений уравнения (2), компоненту  системы (1) будем называть сильно вложимой в уравнение (2).
системы (1) будем называть сильно вложимой в уравнение (2).
2. Общее решение системы
Рассмотрим вложимую систему
 (1)
(1)
(b>0 и а-постоянные) с общим решением
 , если с
, если с 0;
0;
x=0, y=at+c, если с=0, где постоянные с, с, с связаны соотношением с
связаны соотношением с (b+c
(b+c +c
+c )=a, имеет два центра в точках
)=a, имеет два центра в точках и
и  .
.
Решение:
Подставим общее решение
 в нашу систему (1) получим
в нашу систему (1) получим 

=
 =c(ccosct-csinct)=
=c(ccosct-csinct)=
a-
Для краткости распишем знаменатель и преобразуем
x+y+b=

 =
=
=a+c(csinct+ccosct)
a-
Получаем, что x и y являются общим решением системы.
3. Нахождение первого интеграла дифференциальной системы и условия его существования
Рассмотрим систему  = f (t, x), x= (x,тАж, x), (t, x)
= f (t, x), x= (x,тАж, x), (t, x) (1) с непрерывной в области D функцией f. Дифференцируемая функция U (t, x), заданная в некоторой подобласти G области D, называется первым интегралом системы (1) в области G, если для любого решения x(t), t, системы (1), график которого расположен в G функция U (t, x(t)), t, постоянна, т.е. U (t, x(t)) зависит только от выбора решения x(t) и не зависит от t.
(1) с непрерывной в области D функцией f. Дифференцируемая функция U (t, x), заданная в некоторой подобласти G области D, называется первым интегралом системы (1) в области G, если для любого решения x(t), t, системы (1), график которого расположен в G функция U (t, x(t)), t, постоянна, т.е. U (t, x(t)) зависит только от выбора решения x(t) и не зависит от t.
Пусть V (t, x), V:G R, есть некоторая функция. Производной от функции V в силу системы (1) назовем функцию V
R, есть некоторая функция. Производной от функции V в силу системы (1) назовем функцию V V
V R, определяемую равенством
R, определяемую равенством
V (t, x(t))
(t, x(t)) t.
t.
Лемма 1.
Для любого решения x(t), t, системы (1), график которого расположен в G, имеет место тождество
V
 t.
t.
Без доказательства.
Лемма 2.
Дифференцируемая функция U (t, x), U:GR, представляет собой первый интеграл системы (1) тогда и только тогда, когда производная U в силу системы (1) тождественно в G обращается в нуль.
в силу системы (1) тождественно в G обращается в нуль.
Необходимость. Пусть U (t, x) есть первый интеграл системы (1). Тогда для любого решения x(t) этой системы, применяя лемму 1 будем иметь тождества
U


Откуда при t=t получим равенство U(t
получим равенство U(t справедливое при всех значениях t и x(t). Необходимость доказана.
справедливое при всех значениях t и x(t). Необходимость доказана.
Достаточность. Пусть теперь U при всех (t, x)
при всех (t, x) Тогда для любого решения x(t) системы (1) на основании леммы1 будем иметь тождества
Тогда для любого решения x(t) системы (1) на основании леммы1 будем иметь тождества
а с ним и достаточность.
Из определения первого интеграла следует, что постоянная на G функция также является первым интегралом системы (1). Первый интеграл U (t, x) будем называть на G, если при всех (t, x) выполняется неравенство.
выполняется неравенство.

Функцию U(x) будем называть стационарным первым интегралом системы (1), если она не зависит от t и является первым интегралом системы (1).
Найдем первый интеграл нашей системы:
Возведем в квадрат и выразим с

y
Положим  , получим
, получим



Проверим, что функция 
 тАУ это первый интеграл системы (1), т.е. проверим выполнение тождества
тАУ это первый интеграл системы (1), т.е. проверим выполнение тождества  (2)
(2)
Найдем производные по t, x, y






После выше сделанных преобразований получаем, что функция тАУ это первый интеграл системы (1),
2) Положим  , т.е.
, т.е.  ,
,
где  , Q
, Q

3) Проверим выполнение тождества:
 (3), где
(3), где 
Преобразуем (3).
 [в нашем случае
[в нашем случае  ] =
] = 
 =
= [учитывая все сделанные обозначения] =
[учитывая все сделанные обозначения] =
=
=
= [ввиду того, что
[ввиду того, что 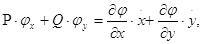 которое в свою очередь как мы уже показали есть тождественный ноль]
которое в свою очередь как мы уже показали есть тождественный ноль]
Таким образом, тождество (3) истинное.
4. Отражающая функция
Определение. Рассмотрим систему
 (5)
(5)
cчитая, что правая часть которой непрерывна и имеет непрерывные частные производные по  . Общее решение в форме Коши обозначено через
. Общее решение в форме Коши обозначено через  ). Через
). Через  обозначим интервал существования решения
обозначим интервал существования решения  .
.
Пусть

Отражающей функцией системы (5) назовём дифференцируемую функцию  , определяемую формулой
, определяемую формулой

Для отражающей функции справедливы свойства:
1.) для любого решения  системы (5) верно тождество
системы (5) верно тождество

2.) для отражающей функции F любой системы выполнены тождества

3) дифференцируемая функция будет отражающей функцией системы (5) тогда и только тогда, когда она удовлетворяет системе уравнений в частных производных

и начальному условию

5. Применение теоремы об эквивалентности дифференциальных систем
Получаем  где
где  - любая нечетная непрерывная функция.
- любая нечетная непрерывная функция.
Наряду с дифференциальной системой  (1)
(1)
рассмотрим возмущенную систему (2), где - любая непрерывная нечетная функция. Известно по [3], что дифференциальная система
(2), где - любая непрерывная нечетная функция. Известно по [3], что дифференциальная система 

 (3)
(3)
эквивалентна возмущенной системе
 (4), где
(4), где  непрерывная скалярная нечетная функция удовлетворяющая уравнению
непрерывная скалярная нечетная функция удовлетворяющая уравнению 
Так как выше уже показано, что функция  где
где  {есть первый интеграл} удовлетворяет этому уравнению, то справедлива следующая теорема.
{есть первый интеграл} удовлетворяет этому уравнению, то справедлива следующая теорема.
Теорема1.
Система (1) эквивалентна системе (2) в смысле совпадения отражающей функции.
Так как система (1) имеет две особые точки, в каждой из которых находится центр, то и система (2) имеет центры в этих точках.
Заключение
В данной курсовой работе рассмотрена вложимая система с известным типом точек покоя, проверено удовлетворение общего решения нашей системе, найдены первый интеграл и проверено выполнение тождества, затем с помощью теоремы 1 доказана эквивалентность дифференциальных систем. Сформулированы определения вложимой системы, первого интеграла, отражающей функции и общие свойства отражающей функции. Cформулирована теорема при помощи которой мы доказали эквивалентность нашей системы с дифференциальной системой.
Список использованных источников
1. Мироненко В.И. Линейная зависимость функций вдоль решений дифференциальных уравнений. тАУ Мн., Изд-во БГУ им. В.И. Ленина, 1981, 50 тАУ 51 с.
2. Мироненко В.И. Отражающая функция и периодические решения дифференциальных уравнений. тАУ Мн.: изд-во ВлУниверситетскоеВ», 1986, 11,17 тАУ 19 с.
3. Мироненко В.В. Возмущения дифференциальных систем, не изменяющие временных симметрий. 2004 г.
Вместе с этим смотрят:
10 способов решения квадратных уравнений
РЖнварiантнi пiдпростори. Власнi вектори i власнi значення лiнiйного оператора
РЖнтегральнi характеристики векторних полiв
РЖнтерполювання функцiй
Автокорреляционная функция. Примеры расчётов