Представлення i перетворення фiгур
ПРЕДСТАВЛЕННЯ РЖ ПЕРЕТВОРЕННЯ ТОЧОК
Представлення точок здiйснюiться наступним чином:
На площинi ![]()
У просторi ![]()
Перетворення точок.
Розглянемо результати матричного множення ![]() , що визначаi точку Р, i матрицi перетворення 2х2 загального виду:
, що визначаi точку Р, i матрицi перетворення 2х2 загального виду:
 (3.1)
(3.1)
Дослiдимо декiлька часткових випадкiв.
1) а=d=1 i c==0. Змiн не вiдбуваiться
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВаВаВаВа (3.2)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВаВаВаВа (3.2)
2) d=1, =c=0. Змiна масштабу по осi x
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.3)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.3)
3) =c=0. Змiна масштабу по осях x i y
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВаВаВаВа (3.4)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВаВаВаВа (3.4)
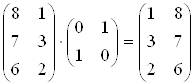
4) =c=0, d=1, a=-1. Вiдображення координат вiдносно осi y
 .ВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВаВаВаВа (3.5)
.ВаВаВаВаВаВаВаВаВаВаВаВаВа ВаВаВаВаВаВаВаВа (3.5)
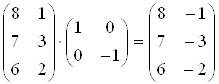
5) =c=0, a=d<0. Вiдображення вiдносно початку координат
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.6)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.6)
6) а=d=1,c=0. Зсув
 .ВаВа ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.7)
.ВаВа ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.7)
Для початку координат маiмо iнварiантно
 .
.
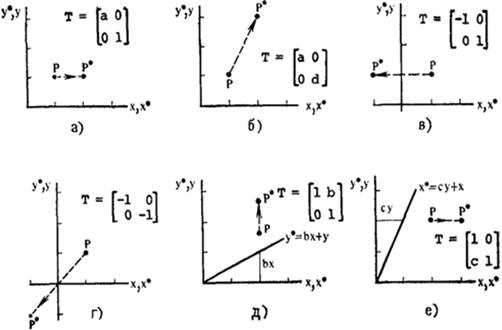
Рис.3.1. Перетворення точок.
ПЕРЕТВОРЕННЯ ПРЯМИХ ЛРЖНРЖЙ
Пряма задана 2 векторами.
Вектори положення точок А i В рiвнi ![]() Ваi
Ваi ![]() .
.
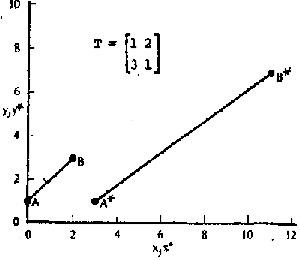
Рис.3.2. Перетворення прямих лiнiй.
Матриця перетворення
 .
.
Одержимо:
 ,ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.8)
,ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.8)
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.9)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.9)
Альтернативне представлення лiнii AB
 .
.
Пiсля цього множення матрицi L на Т дасть
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.10)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.10)
Операцiя зсуву збiльшила довжину лiнii i змiнила ii положення.
ОБЕРТАННЯ
Розглянемо плоский трикутник ABC.
Здiйснимо поворот на 90В° проти годинниковоi стрiлки.
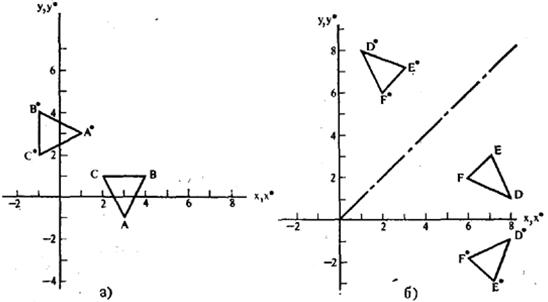
Рис.3.3. Обертання i вiдображення.
Одержимо
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.11)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.11)
В результатi отримаiмо трикутник A*B*C*. Поворот на 180В° задаiться матрицею
 ,
,
поворот на 270В° навколо початку координат - за допомогою матрицi:
 .
.
ВРЖДОБРАЖЕННЯ
Вiдображення визначаiться поворотом на 180В° навколо осi, що лежить у площинi ху.
1) Обертання навколо прямоi y=x задаiться матрицею:
 .
.
Новi вирази визначаються спiввiдношенням:
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.12)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.12)
2) Обертання навколо осi y=0 задаiться матрицею:
 .
.
Новi вершини визначаються спiввiдношенням:
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.13)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.13)
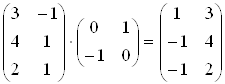
ЗМРЖНА МАСШТАБУ
Змiна масштабу визначаiться значенням 2-х елементiв головноi дiагоналi матрицi.
Якщо використовуiмо матрицю  Вамаiмо збiльшення в 2 рази.
Вамаiмо збiльшення в 2 рази.
Якщо значення елементiв не рiвнi, то маi мiсце спотворення.
Трикутник ABC перетворений за допомогою матрицi . Трикутник DEF перетворений за допомогою матрицi  . Маiмо спотворення.
. Маiмо спотворення.
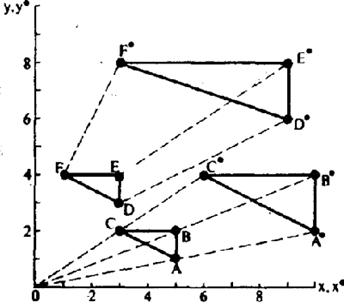
Рис.3.4. Рiвномiрна i нерiвномiрна змiна масштабiв.
ДВОВИМРЖРНИЙ ЗСУВ РЖ ОДНОРРЖДНРЖ КООРДИНАТИ
Введемо третiй компонент у вектори точок ![]() Ваi
Ваi ![]() -
-![]() Ваi
Ваi ![]() .
.
Матриця перетворення матиме вигляд:
перетворення фiгура площина точка
 .
.
Таким чином,
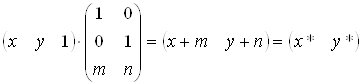 .ВаВаВаВаВаВаВаВаВаВа (3.14)
.ВаВаВаВаВаВаВаВаВаВа (3.14)
Константи m, викликають зсув x* i y* вiдносно x i y.
Матриця 3х2 не квадратна - вона не маi оберненоi матрицi.
Доповнимо матрицю перетворення до квадратноi
 .ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.15)
.ВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВаВа (3.15)
Третiй компонент не змiнюiться.
Вместе с этим смотрят:
РЖнварiантнi пiдпростори. Власнi вектори i власнi значення лiнiйного оператора
РЖнтегральнi характеристики векторних полiв
Автокорреляционная функция. Примеры расчётов
Актуальные проблемы квантовой механики